




ニュース
失敗を解析、次回に生かす–「月面ビジネス」に挑み続けるispaceの不屈不撓
2023.06.14 08:00



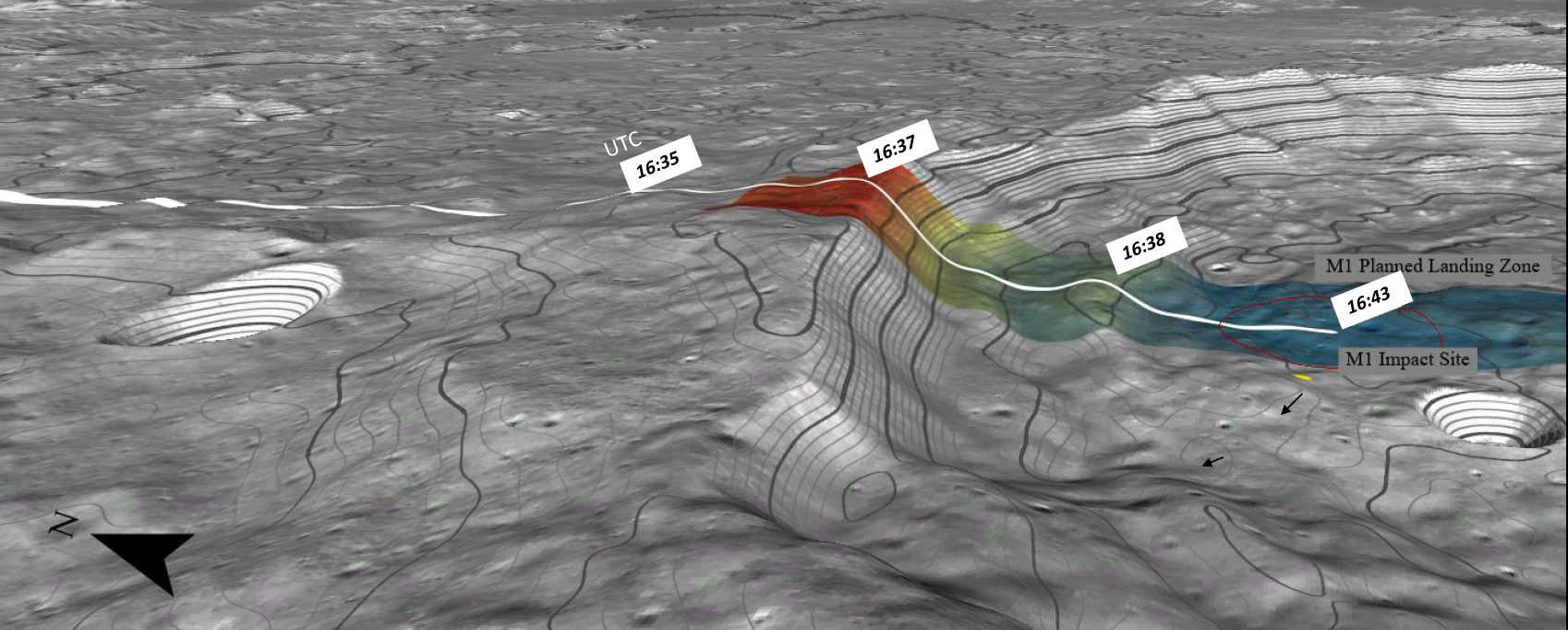
だが、世界標準時で午後4時37分に「測定高度」が急激に上昇。「推定高度」との乖離が一気に大きくなっていく。ここでGNCは、LRFが示したデータは「間違っている」と判断し、LRFからのデータを取り込まなくなる。午後4時38分、LRFの「測定高度」は高度6kmだが、「推定高度」は高度3km。
「測定高度」と「推定高度」の乖離は収束されない。ランダーは(4)のブレイキングバーン&ピッチアップの段階に入り、機体は垂直姿勢となって降下していく。「測定高度」と「推定高度」の乖離が始まった午後4時38分から5分後の午後4時43分、「測定高度」は高度5kmだが、「推定高度」は高度0km、つまり月面だ。
だが、ランダーは「月面に着陸した」という信号を得ていない。そのため、ランダーは秒速1m、つまり時速3.6kmで降下していく。その間も推進剤を噴射し続ける。それでも「月面に着陸した」という信号は得られない。やがて推進剤が尽きてしまい、ランダーは姿勢を制御できなくなり、高度5kmから月面に自由落下してしまう。「秒速100m以上、時速360km以上」(氏家氏)の速度で月面に墜落したとみられる。

「十分な時間を確保できなかった」
ランダーが何が起きていたのかはここまで見た通りだが、墜落の原因は何か。午後4時37分に「測定高度」が急激に上昇したが、「推定高度」との乖離は収束されなかった。なぜ、「測定高度」が急激に上昇したのか。
墜落の原因もispaceは突き止めている。
ランダーの着陸予定地は、月の表側で北側にある「氷の海(Mare Frigoris)」の南東にあるAtlas Crater。ランダーは、Atlas Craterへの航行中にAtlas Craterの縁にあたる高さ3kmという崖の上空を通過している。この崖の上を通過した時に、LRFによる「測定高度」が急激に上昇してしまった。
GNCに設定された「推定高度」と「測定高度」が想定以上に乖離したことから、GNCは乖離の原因をLRFの異常と判断。こうしたことから、GNCはLRFなどからのデータを取り込まなくなってしまった。
なぜ、GNCは「推定高度」と「測定高度」が乖離してしまった原因を「LRFの異常」と判断したのか。これは、GNCに搭載された「フィルター」機能によるものだ。
フィルター機能は、LRFを含むセンサーなどにハードウェア上の不具合が発生し、間違ったデータが計測される場合に安定運用を維持するために設計されたもの。
ランダーがAtlas Craterの縁にあたる高さ3kmという崖の上空を通過したために、LRFによる「測定高度」が急激に上昇。この時にフィルター機能は、「推定高度」から乖離が著しく大きかったために「測定高度」データを採用しないと判断してしまった。
Related Articles




最新記事
Show more
フォトレポート

![[フォトレポート]世界各地を彩るオーロラ、太陽嵐のさなかに](https://uchubiz.com/wp-content/uploads/cnn_35218787_1280x960.jpg)
カテゴリー
タグ検索
- #LEO
- #Starlink
- #SpaceX
- #QPS研究所
- #ISS
- #宇宙飛行士
- #アストロスケール
- #NASA
- #火星
- #Blue Origin
- #SAR
- #ISRO
- #ispace
- #Space BD
- #きぼう
- #スペースデブリ
- #宇宙なんちゃら こてつくん
- #中国
- #Artemis
- #Rocket Lab
- #Artemis II
- #Orion
- #SLIM
- #ESA
- #JAXA
- #Perseverance
- #KDDI
- #キューブサット
- #CLPS
- #HAKUTO-R
- #インターステラテクノロジズ
- #HOSPO
- #Artemis III
- #Artemis I
- #Starship
- #コンステレーション
- #天地人
- #J-SPARC
- #SLS