


ニュース
JAXAとDLRが開発したロボット2台、ISS内で連携した共同作業に成功
2025.07.31 17:45



宇宙航空研究開発機構(JAXA)とドイツ航空宇宙センター(DLR)は、国際宇宙ステーション(ISS)でそれぞれが開発したロボットの相互通信と連携作業の実証ミッションを実施、成功した。7月31日に発表した。
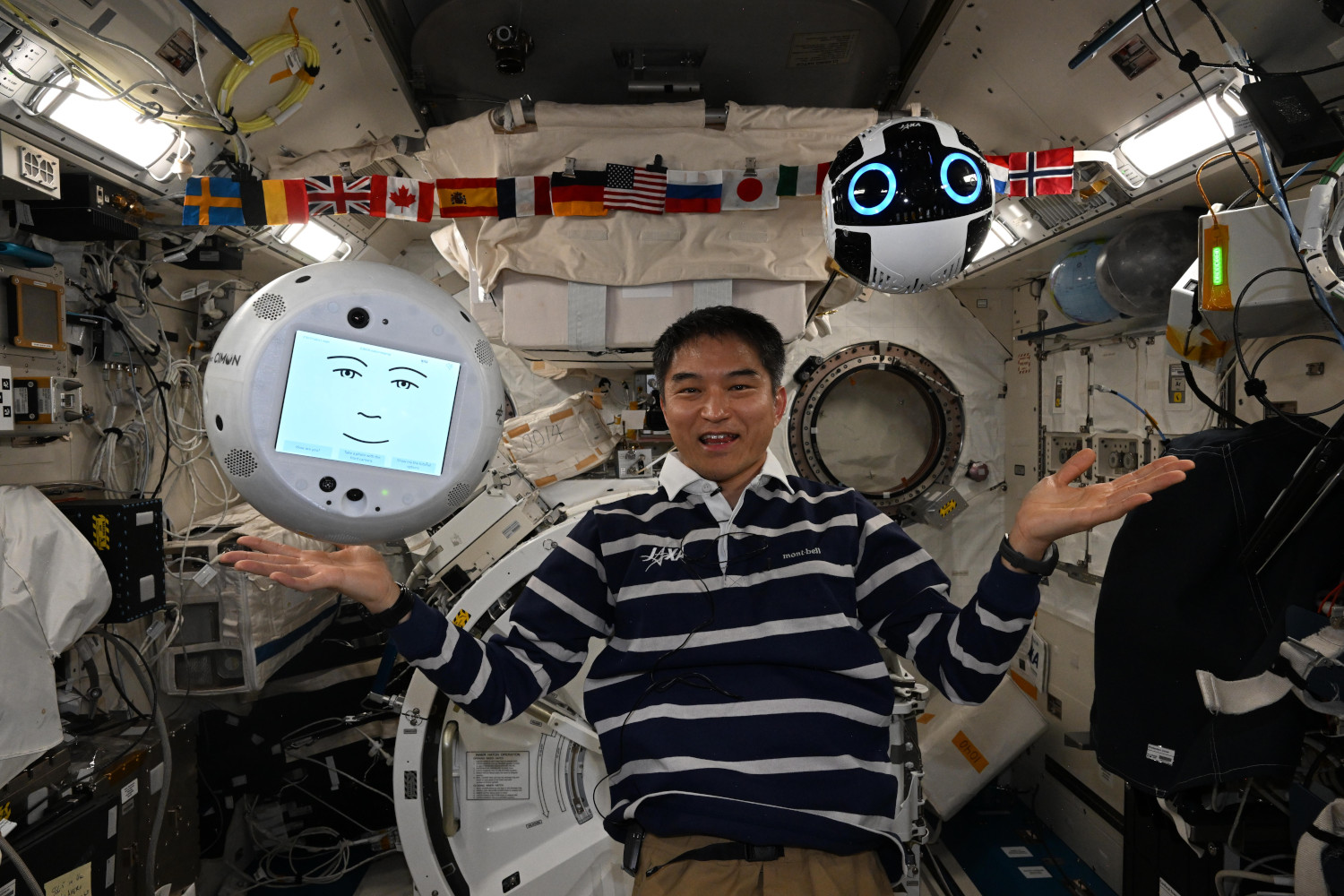
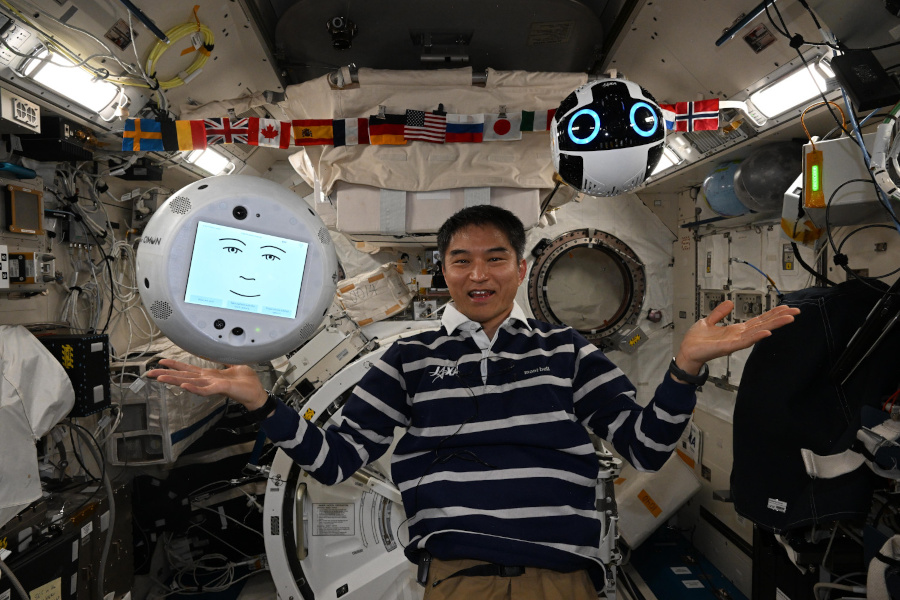
ミッションに挑んだのは、JAXAが開発した「JEM船内可搬型ビデオカメラシステム実証2号機」(Int-Ball2)、DLRなどが開発した「Crew Interactive MObile companioN」(CIMON)。Int-Ball2は日本実験棟(JEM)「きぼう」に設置、CIMONは欧州実験棟「Columbus」に設置されている、
今回の実証ミッション「ICHIBAN」(IntBall-2 CIMON Hovering Intelligences Building AI Network)では、Int-Ball2とCIMONが連携して大西卓哉宇宙飛行士とともに共同作業を行ったという。具体的には、Columbusにいる大西氏が、CIMONの音声認識機能を通じて、きぼう内のInt-Ball2を遠隔操作して、きぼうの中にある物品を捜索した。
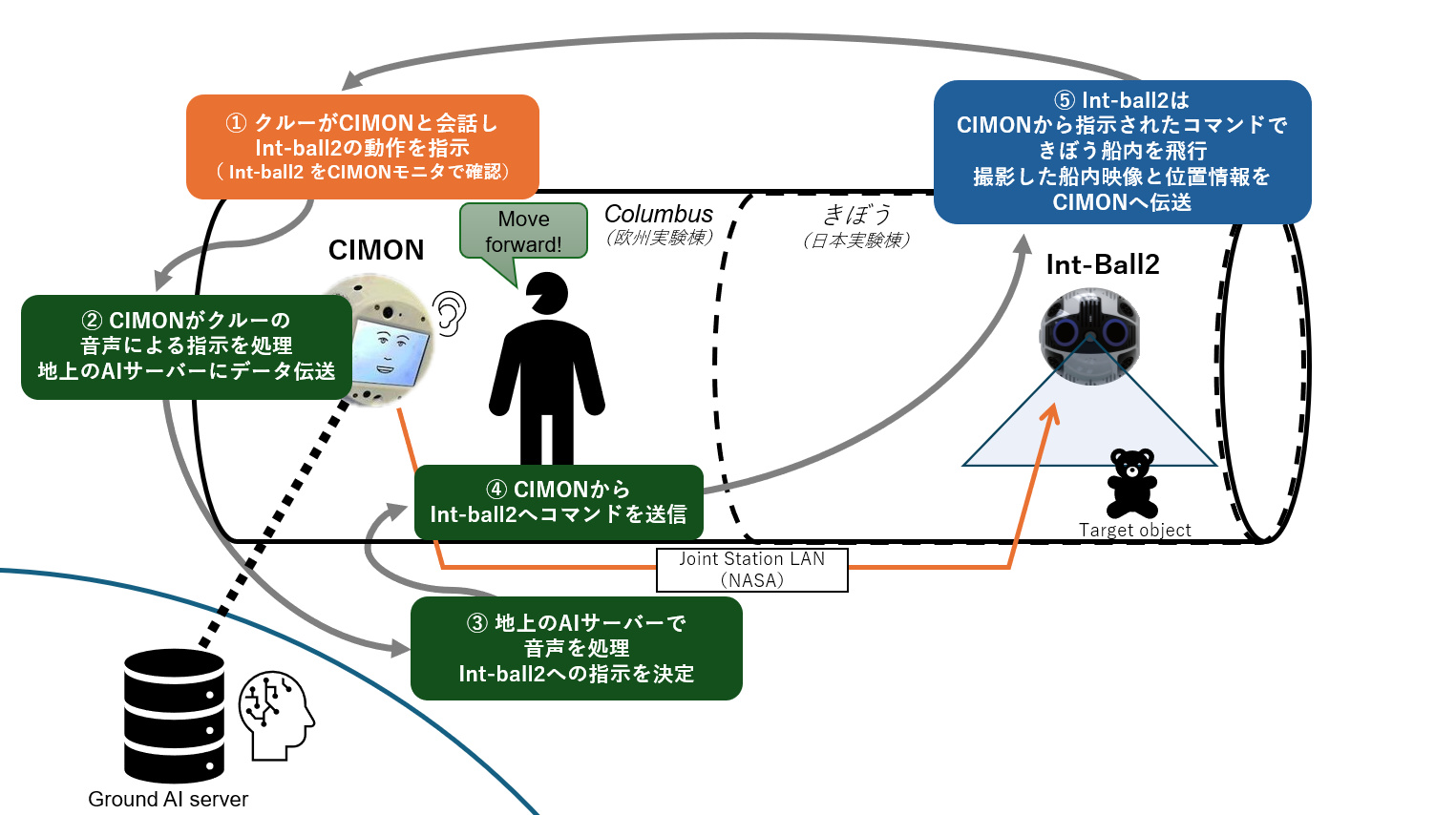
CIMONは、大西氏からの音声での指示とInt-Ball2から送信される位置情報をもとにInt-Ball2の移動コマンドを生成し、Int-Ball2に送信。その指示に従って、Int-Ball2はきぼう内を移動して、搭載されたカメラで取得した映像をCIMONのモニターに配信、大西氏がその映像を確認するという一連の作業となっている。
別機関で独自に開発されたロボット同士が軌道上で相互に通信して、共同で作業するのは世界初の成果と説明している。
地上では、複数台のロボットによる協調や自動化装置との連携研究が進められているが、今回の実証は宇宙環境に拡張した試みになる。JAXAとDLRがそれぞれ開発したロボットの間で協調動作を成立させることで、以下の3点を目標としている。
- ロボット間連携インターフェースの確立
- 地上との通信と軌道上のロボットの間での通信の両立
- 地上運用の方法や手順の確立
ICHIBANでは、「ロボット間連携インターフェースの確立」「地上との通信と軌道上のロボットの間での通信の両立」の実証に成功し、地上運用方法の指針を得られたと説明。得られた知見は、今後の有人宇宙活動で宇宙飛行士とロボットによる効率的な協調運用の基盤となることが期待されるという。
Int-Ball2はJAXAが開発した船内ドローン。きぼうで宇宙飛行士のカメラ、撮影作業を支援する。地上からの遠隔操作でISS内を移動し、写真や動画を撮影することでクルーの作業負担を大幅に軽減できるとしている。
CIMONはDLRやAirbus、IBMが共同で開発したAI(人工知能)を搭載する船内ドローン。AIで宇宙飛行士の作業補助の実証を目的にしている。AIでの音声認識機能を活用して会話できる機能も搭載して、宇宙飛行士のストレス軽減と作業効率を支援するという。
Related Articles




最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #ISS
- #中国
- #スカパーJSAT
- #QPS研究所
- #SAR
- #衛星データ
- #SpaceX
- #NASA
- #Crew Dragon
- #きぼう
- #ispace
- #スペースプレーン
- #Boeing
- #HAPS
- #Starlink
- #宇宙飛行士
- #ElevationSpace
- #LEO
- #Blue Origin
- #Orion
- #Artemis
- #Artemis II
- #火星
- #KDDI
- #SLS
- #ESA
- #Falcon 9
- #GNSS
- #天宮
- #Starship
- #宇宙港
- #Axiom Space
- #サブオービタル
- #HOSPO
- #Firefly Aerospace
- #Starliner
- #将来宇宙輸送システム
- #Synspective
- #インターステラテクノロジズ
- #Perseverance
- #スペースデータ
- #Space BD
- #JAXA
- #Artemis III
- #ZERO
- #スペースデブリ
- #AST SpaceMobile
- #Rocket Lab
- #SPACE COTAN
- #天地人
- #HAKUTO-R
- #SLIM
- #Super Heavy
- #Sierra Space
- #キューブサット
- #CCP
- #J-SPARC
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #H3
- #Artemis I
- #宇宙なんちゃら こてつくん