




特集
宇宙飛行士の作業を減らすロボット技術–古川宇宙飛行士のISS実験をJAXA担当者に聞く



宇宙を題材にした映画やテレビドラマでは、ロボットやAIが心強いパートナーとして描かれるシーンをよく目にする。たとえば「スター・ウォーズ」のR2-D2や、「宇宙兄弟」のブギーなどだ。これまではSFの世界での出来事だったが、実は現実世界でもロボットが宇宙飛行士をサポートする時代が訪れつつある。
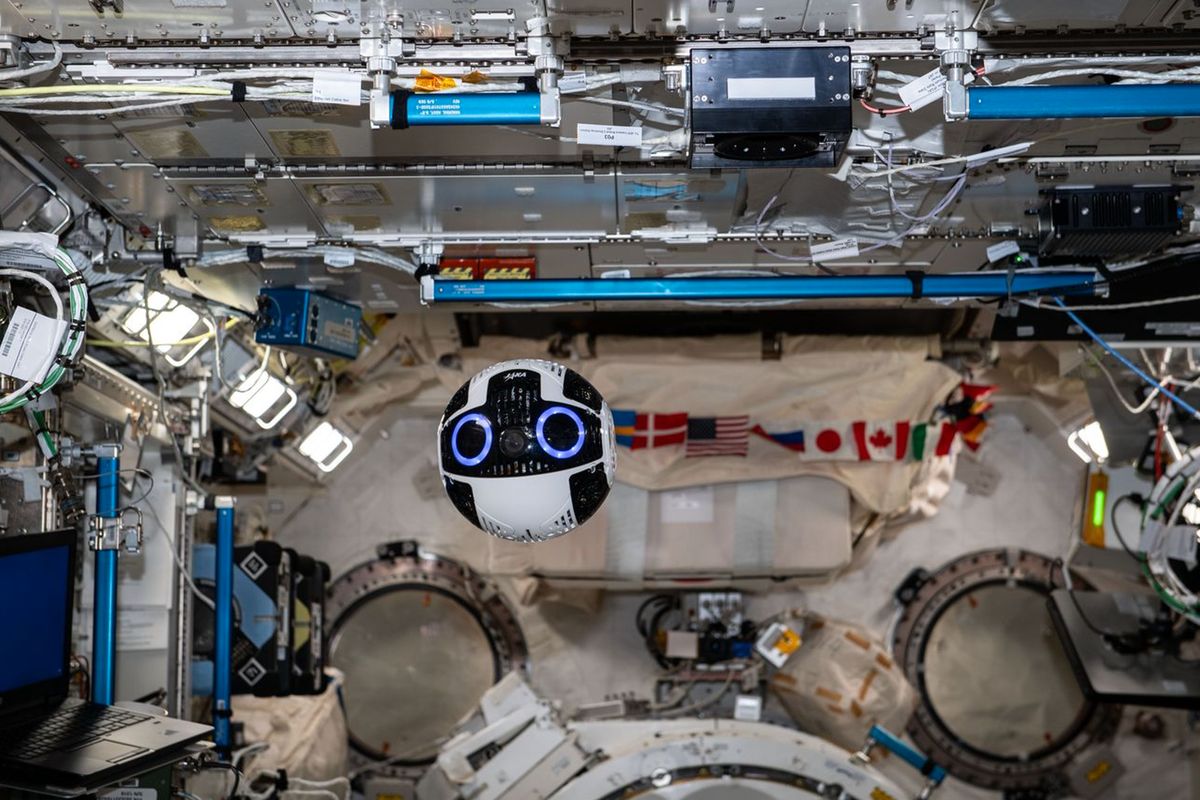
日本では、宇宙航空研究開発機構(JAXA)が、地球低軌道上に浮かぶ国際宇宙ステーション(ISS)と連携してさまざまな自動化・自律化技術の研究を進めている。現在ISSに長期滞在中の古川聡宇宙飛行士が参加する「きぼう」利用ミッションでは、ISS内を⾶び回る撮影用ドローンロボット「Int-Ball2(JEM Internal Ball Camera2)」を活用することで、宇宙⾶⾏⼠の作業時間の軽減を目指している。

今回の実験内容「JEM船内可搬型ビデオカメラシステム実証2号機」やその先を見据えた自動化・自律化の取り組みについて、研究開発を担当するJAXA有人宇宙技術部門 有人宇宙技術センター 山口正光ピヨトル氏に聞いた。
きぼうを「テストベッド」に有人宇宙技術獲得を目指す
JAXAの有人宇宙技術部門では、「ISS・国際宇宙探査を中心とした人類の活動領域の拡大」と「宇宙環境の本格的な利活用」を目指している。その中で有人宇宙技術センターは、「きぼう」を維持・運用したり、機器を開発したりしながら、得られた知見を将来の有人宇宙活動に役立てるための研究・技術開発を担っている。山口氏のチームはロボット技術をどのように活用していくかに取り組んでいるという。
「今後の宇宙利用活動としては、『宇宙ステーションや地球の周り(地球低軌道)での宇宙環境の利用』と、その先にある『月や火星の有人探査』という大きく2つの方向性がある。どちらにせよ宇宙に行ける人数や移動時のスペースは限られるため、リソースが不足する部分はロボット技術などで支援することを目指している。いまはロボットでできることは限られており、特に船内作業の多くは宇宙飛行士に頼っているのが実情。ただし、宇宙飛行士の時間は貴重でできることに限りがある。そこでわれわれは、人ではなくてもできる部分、特に繰り返し作業の部分を自動化・自律化する研究に取り組んでいる」(山口氏)
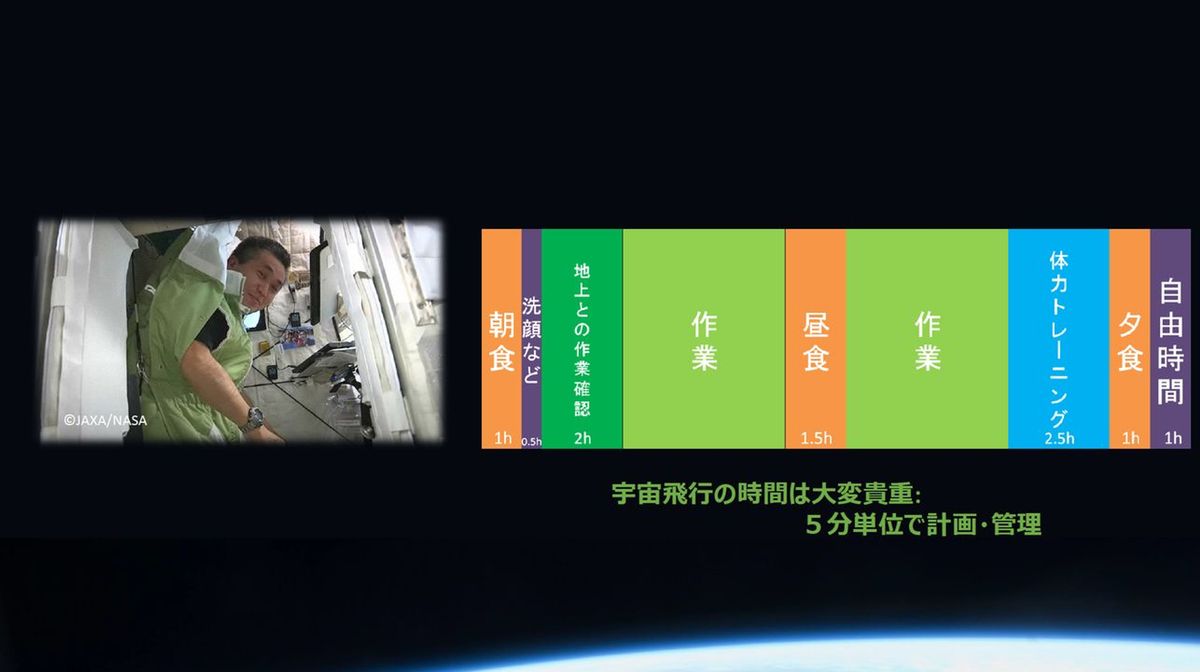
国際宇宙ステーションでは6名の宇宙飛行士が長期滞在しており、約6カ月ごとに交代しながら、宇宙環境での科学実験やISSの保守作業などをしている。限られた人数で運用しているため、5分単位でスケジュールを管理して作業している(出典:「ファン!ファン!JAXA!」)
その際には、地上の技術を活用してISSでの有人宇宙活動の負担を軽減すると共に、宇宙特有の環境下で開発した技術成果を地上にフィードバックすることも目指しているという。
「これから月や火星を目指すにあたって、常に宇宙飛行士が滞在しているISSの『きぼう』は、まず宇宙の環境で“試す場”として利用することができる。『きぼう』をロボティクスの実験の場(テストベッド)にして、少しずつ自動化・自律化の技術獲得を重ねていくことが、われわれのミッション。地上でも模擬環境やシミュレーターを用意して、さまざまなロボット技術・要素技術の研究・開発を進めている」(山口氏)

宇宙空間での船外活動に欠かせない「ロボットアーム」
宇宙ロボットとして代表的なものが、ISSの船外に設置されたロボットアーム。「きぼう」のロボットアーム(JEMRMS)は2008年に運用を開始した。船外実験プラットフォームに設置する実験装置の設置や取り外し、搭載機器の交換作業、「きぼう」エアロックを使った船外への実験装置などの搬出や船内への回収、実験の支援、保守・保全作業時の支援、資材の運搬、小型衛星の放出などに使われている。運用初期は宇宙飛行士が船内から操作し、現在は地上から遠隔で操作できるようになっている。
「長年の運用を経てさまざまな作業ができるようになったことに加えて、オペレーションの内容自体も進化している。ロボットアーム以外にも、たとえばエアロックのオペレーションも現在は地上から遠隔で操作できるようになった。以前は、宇宙飛行士がエアロック内の空気を抜く作業を『きぼう』船内で行っていたが、現在は地上から遠隔でボタンやバルブを操作している。宇宙飛行士には物品のセットアップのみしてもらい、次の作業に移れるようになった」(山口氏)

JAXAが開発した新たなロボット「Int-Ball」
前述のロボットアームは「きぼう」の構想時から存在しており、すでにISS上で安定して動いている。そして新たにJAXAが開発に取り組んでいるのが、船内向けの撮影ロボット「Int-Ball」。2017年に初号機が打ち上げられ、今まさに「きぼう」内で2号機(Int-Ball2)による実証が行われている。Int-Ball2は地上の管制員の操作でISS内を⾶び回り、写真や動画を撮影することで、宇宙⾶⾏⼠の作業時間を⼤幅に軽減できるという。
「宇宙での作業は、宇宙飛行士がすべて自分で行うのではなく、地上の研究者やエンジニアの『こういう実験をしたい』『こういうシステムのメンテナンスをしたい』という要望をもとに、宇宙飛行士と地上の管制員が連携しながら進めていく必要がある。その際には映像によるコミュニケーションが有効だが、今はその都度宇宙飛行士にカメラをセットアップしてもらっており、そのセッティングのための時間をわざわざ確保する必要がある。そこで地上から遠隔操作できるドローンで撮影作業を自動化し、貴重な宇宙飛行士の時間を確保するために、JAXAはInt-Ball2を開発して現在その実証を行っている」(山口氏)
周囲の地図を作りながら動き続ける新機能を搭載
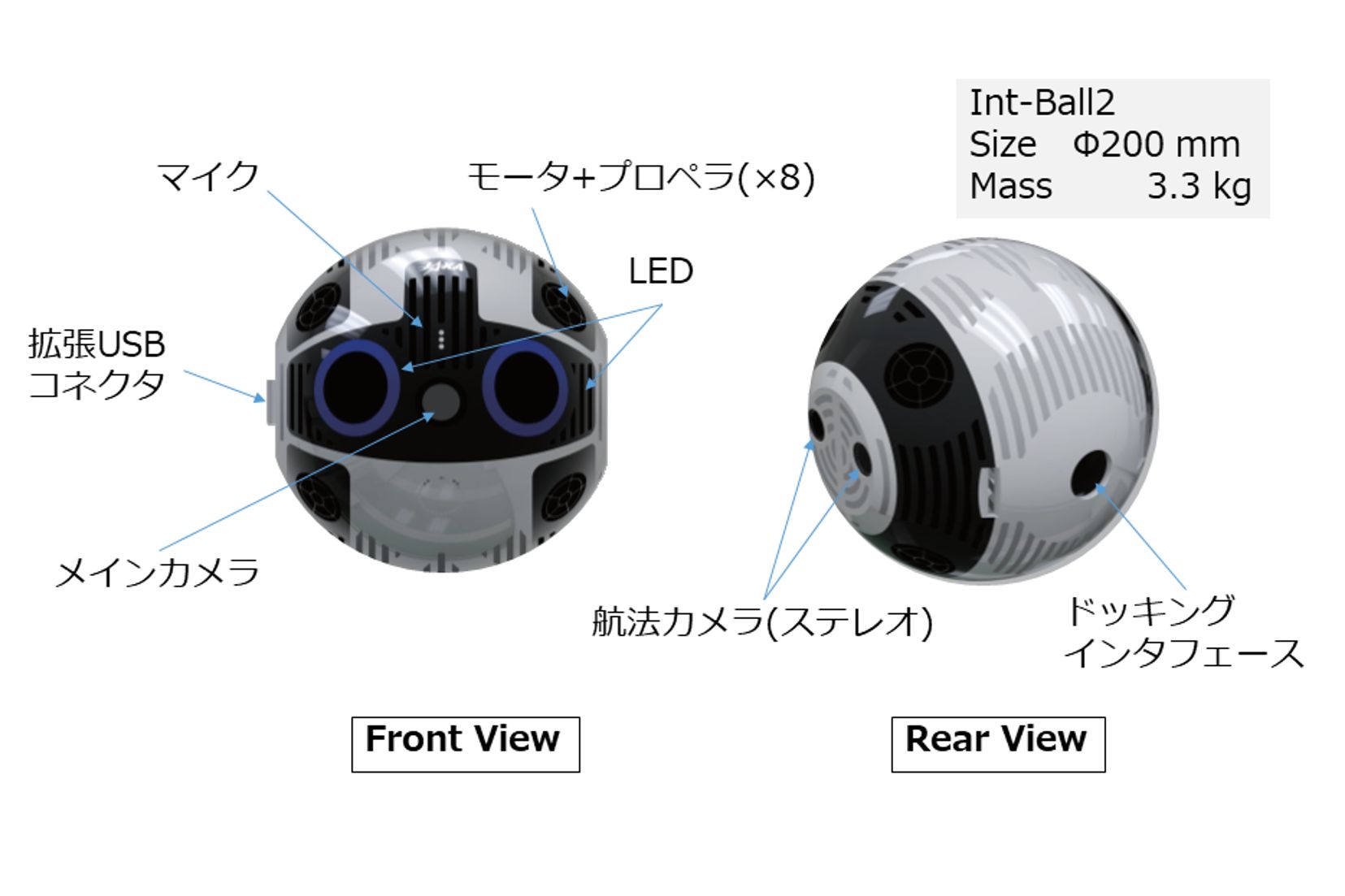
Int-Ballは、機動戦士ガンダムシリーズに登場する「ハロ」のような球体の形状をしている。もちろん技術的な理由があり、山口氏は「宇宙飛行士に圧迫感や危害を与えないという意味で、小さく、丸く、邪魔にならないことを重要視している」と説明する。
初号機は軌道上で基本機能の確認などをいろいろと試し、その結果を受けて2号機は改良を重ね、実際に運用で本稼働させることを目的に作られている。2号機は2023年6月に打ち上げられており、10月からきぼう内で飛び始め、基本機能の確認作業をしている。古川氏には、ISS滞在中にそれらの機能確認テストを1つひとつ実施してもらったという。これまでに航法・誘導・制御機能の確認、自動リリース・ドッキング機能の確認が行われている。
初号機での実証を経て改良したポイントをみると、インテリジェンスな機能を追加した。移動と姿勢変更のための推進力も、初号機は3軸姿勢制御モジュールと12個の小型ファンを使っていたが、2号機では推力を向上させた8つのプロペラファンだけで動くようになり、全体として初号機よりも高い移動性能を実現している。
そして最大の改善点が、自身が地図を作りながら飛び続けられるという点と、新たに開発されたドッキングステーションに自動で発着できることである。以前はきぼう内にターゲットマーカーを貼り、それを捉えて移動していたが、2号機ではサイドに2つのカメラで距離を測定できる「ステレオカメラ」を搭載。人の目と同じように距離感を測り、自分がどう動いたのかを踏まえて、周りの地図を作りながら動き続けられるという。さらに、充電のために自動でドッキングして再飛行する機能も追加された。
「Int-Ball2では、カメラで常に自分の位置と周りの環境を認識しながら動く『Visual-SLAM』という技術を採用している。これによって、船内の環境が変化する『きぼう』の中でも、安定して自分の位置や姿勢を計測しながら飛ぶことが可能になった。加えて、Int-Ball2は自動でドッキングステーションに戻ってこられる設計になっている。ドッキングステーションは充電装置も兼ねており、初号機ではもともと宇宙飛行士にケーブルを差して充電してもらっていたところを、2号機では自身でドッキングステーションに戻って充電できる」(山口氏)
地上で進むさらなる「自動化」への取り組み
カメラ以外の領域でも、将来的に宇宙飛行士の作業を自動化するために、地上でさまざまな技術開発が進んでいる。「今後はさらに宇宙飛行士の船内操作の補助や、宇宙飛行士の作業で必要な準備やチェック、片付けを自動・遠隔で対応し、宇宙飛行士には人にしかできない作業をしてもらうことを目指している」と山口氏は話す。
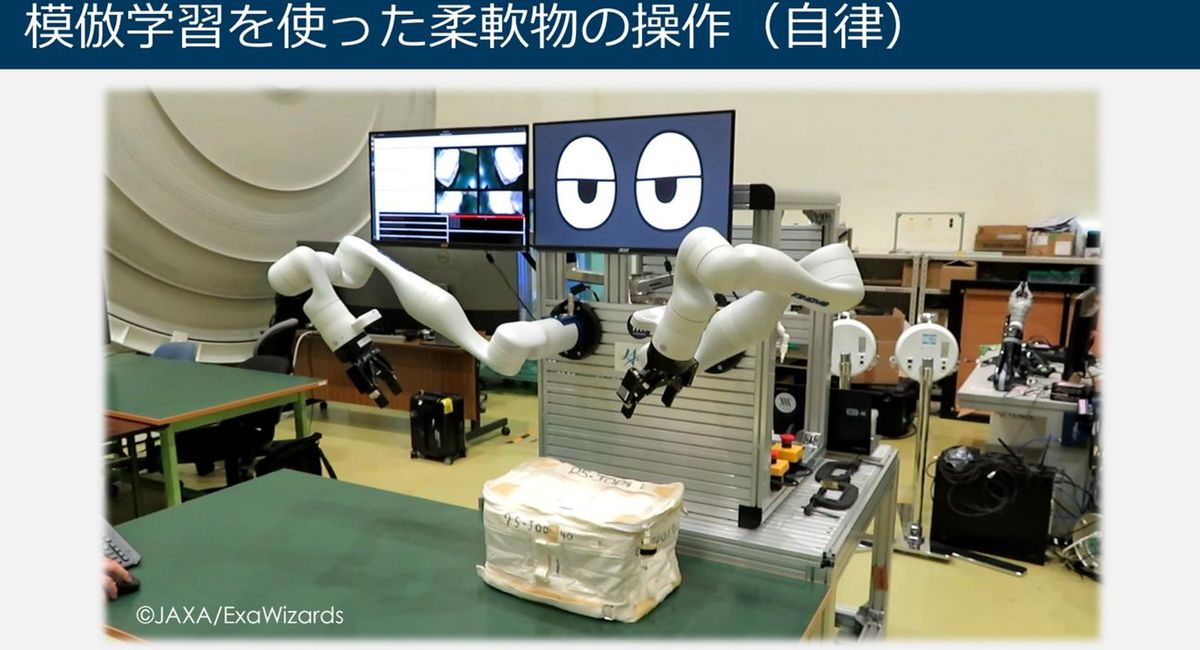
たとえば、山口氏のチームでは、筑波宇宙センターの施設内にISS「きぼう」船内の疑似環境を構築し、船内ロボットアームなども組み合わせた操作作業の自動化にもチャレンジしている。「ロボットは決められたものを決められたように動かすことは得意だが、やわらかいものを持ったり、形が変わるものを掴んで動かしたりする動きは苦手。船内に持ち込むものは軽量化が図られ素材も柔らかいものが多いので、人の動きの映像から機械学習させる『予想学習』によって、それらを掴めるようにしたり、チャックを開け閉めしたりする検証もしている」(山口氏)

柔軟なアーム操作技術を得られた先には、宇宙ステーション内を動き回り、宇宙飛行士が寝ている間に作業をしてくれるような多脚ロボットを開発する構想もあるとのこと。それらを実現するためにも、仲間を増やしていきたいと山口氏は語る。実際にこれまで宇宙に採用された多くのロボット技術には、民生品や民間との共同研究成果が採用されており、地上の既存技術が宇宙に活用できることは明らかだ。
「Int-Ballも、多くは民間の技術をベースに開発したもの。地上の技術をもとに開発したとしても、宇宙向けの自動化・自律化のための改良や試行錯誤は、地上の技術の改良にも生かせる。JAXAでは技術をお持ちの方々と積極的に連携して自動化・自律化技術を開発し、それを『きぼう』に適用することで、将来の地球低軌道利用や有人宇宙探査に向けた技術革新を進めていきたい。JAXA宇宙探査イノベーションハブのウェブサイトにもロボット開発に必要な情報提供要請(RFI)を掲載しているので、ぜひご覧いただきたい」(山口氏)
とはいえ、民間企業としては、たとえロボットによる自動化・自律化の技術は持っていても、収益的なリターンが得られるまでに膨大なコストや期間がかかってしまうようでは、参入に二の足を踏んでしまうだろう。この点について山口氏は「われわれのほうで、民間企業の代わりにできること、できないことを試して、どこまでを自動化するべきか指針を作ることを検討している」と説明した。
Related Articles



最新記事
Show more
フォトレポート


![[フォトレポート]地球からは見えない謎に満ちた「月の裏側」--中国「嫦娥6号」が撮影](https://uchubiz.com/wp-content/uploads/20240604_change6_1280x960.jpg)
カテゴリー
タグ検索
- #火星
- #Perseverance
- #JPL
- #KDDI
- #Starlink
- #NASA
- #ispace
- #HAKUTO-R
- #Rocket Lab
- #SAR
- #Synspective
- #コンステレーション
- #衛星データ
- #中国
- #アストロスケール
- #スペースデブリ
- #JAXA
- #ISS
- #Artemis
- #ESA
- #SpaceX
- #CLPS
- #QPS研究所
- #キューブサット
- #きぼう
- #ElevationSpace
- #LEO
- #Axiom Space
- #Starship
- #Artemis II
- #宇宙飛行士
- #Artemis III
- #Blue Origin
- #H3
- #SLIM
- #HOSPO
- #宇宙なんちゃら こてつくん
- #サンプルリターン
- #インターステラテクノロジズ
- #J-SPARC
- #天地人
- #ISRO
- #Space BD
- #Orion
- #Artemis I
- #SLS