



ニュース
民間月探査「HAKUTO-R」ミッション1、11月28日に打ち上げ–月には5カ月後



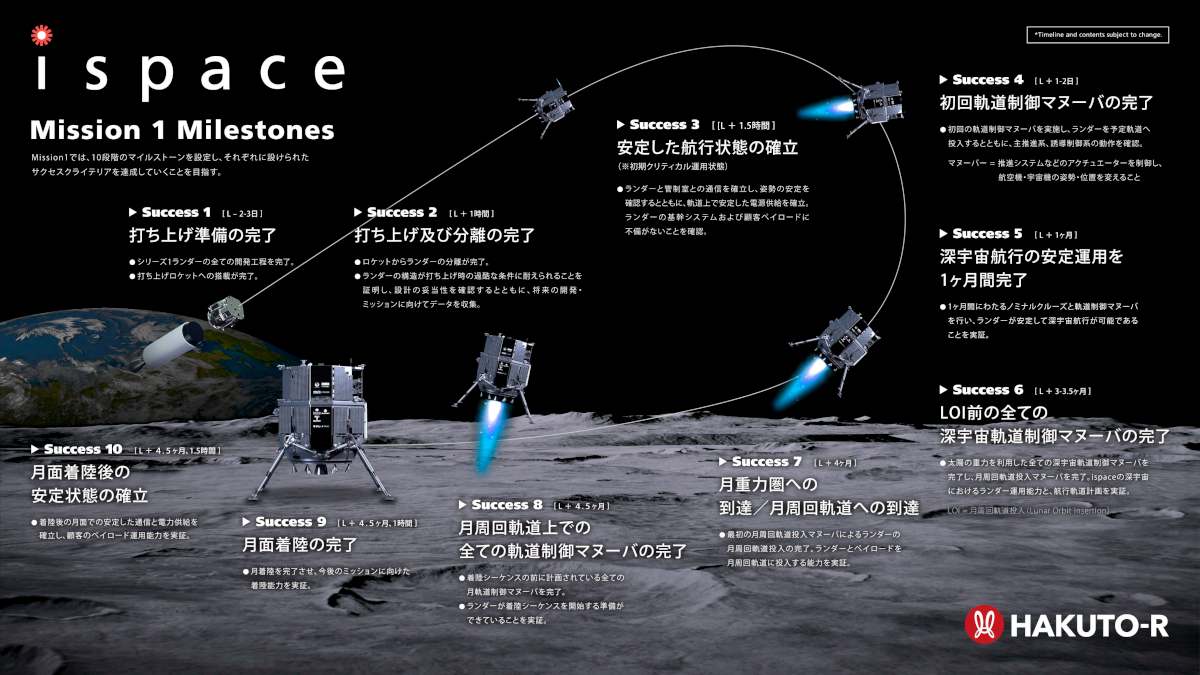
- 初回軌道制御マヌーバの完了
- 初回の軌道制御マヌーバを実行、ランダーを予定軌道に投入するとともに、主推進系と誘導制御系の動作を確認
- 深宇宙航行の安定性を1カ月完了
- 1カ月間ノミナルクルーズと軌道制御マヌーバを実行し、ランダーが安定して深宇宙航行が可能であることを実証
- 月周回軌道投入(Lunar Orbit Insertion:LOI)前の深宇宙軌道制御マヌーバの完了
- 太陽の重力を利用したすべての深宇宙軌道制御マヌーバを完了し、月周回軌道投入マヌーバを完了。ランダーの運用能力と航行軌道計画を実証
- 月重力圏への到達/月周回軌道への到達
- 最初の月周回軌道投入マヌーバによるランダーの月周回軌道投入の完了。ランダーと貨物(ペイロード)を月周回軌道に投入する能力を実証
- 月周回軌道上ですべての軌道制御マヌーバの完了
- 着陸シーケンスの前に計画されているすべての月軌道制御マヌーバを完了
- ランダーが着陸シーケンスを開始する準備ができていることを実証
- 月面着陸の完了
- 月着陸を完了させ、今後のミッションに向けた着陸能力を実証
- 月面着陸後の安定状態の確立
- 着陸後の月面での安定した通信と電力供給を確立し、ペイロード運用能力を実証
同社 最高技術責任者(CTO) 氏家亮氏は、ミッション1の全容について「打ち上げから高度300km以上のあたりで切り離され、(ランダーが)月に向かうのは約50分後。その後は自動的に電源が入り、(備え付けの)ソーラーパネルで効率的な電力発電な状態を維持できるように、自社のミッションコントロールセンターで監視、制御して、月への着陸は約5カ月後になる」と解説した。
今回のミッション1では、宇宙資源法に基づいて、月面の砂やちり(レゴリス)を採取して、所有権を売却することが内閣府から認められている。NASAが取引相手となる、この契約は「世界初」(袴田氏)という。
7つのペイロードを搭載
ミッション1には、外部の企業や組織からのペイロードも搭載される。
- 日本特殊陶業の固体電池
- ドバイ首長国政府宇宙機関ムハンマド・ビン・ラシード宇宙センター(Mohammed Bin Rashid Space Centre:MBRSC)の月面探査ローバー「Rashid」
- 宇宙航空研究開発機構(JAXA)の変形型月面ロボット「SORA-Q」
- カナダMission Control Space Servicesの人工知能(AI)フライトコンピューター
- カナダCanadensys Aerospaceのカメラ
- HAKUTO-Rの前身プロジェクト「HAKUTO」のクラウドファンディング支援者の名前が刻印されたパネル

打ち上げ予定日が明らかになった11月17日に、もう一つのペイロードとして、HAKUTOのアンバサダーだったロックバンド、サカナクションによるHAKUTO応援歌「SORATO」とHAKUTOのフライトモデル「SORATO」の設計データを格納したディスクが搭載されることも発表された。
Related Articles


最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #AST SpaceMobile
- #ISS
- #NASA
- #SpaceX
- #Falcon 9
- #Rocket Lab
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Axiom Space
- #Crew Dragon
- #宇宙港
- #SPACE COTAN
- #HOSPO
- #天地人
- #JAXA
- #スカパーJSAT
- #HAKUTO-R
- #ispace
- #SLIM
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #Starliner
- #CCP
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #スペースデブリ
- #アストロスケール
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis I
- #Artemis II
- #宇宙なんちゃら こてつくん