



ニュース
タカラトミーなどの小型探査ロボット、月面へ–手のひらサイズ、球状から変形
2022.03.16 16:56



タカラトミーは、開発中の月面を移動できる探査ロボット「Lunar Excursion Vehicle 2(LEV-2)」(愛称「SORA-Q(ソラキュー)」)を発表し、動作の紹介映像を公開した。
SORA-Qの目的は、一面が「レゴリス」と呼ばれる細かな砂に覆われ、重力が地球の6分の1しかない月面で活動可能な超小型ロボットの探査技術を実証すること。将来の有人月面探査に向けて、自動運転技術や走行技術の検討に必要な月面データを取得も目指している。
2022年度中に打ち上げる予定の小型月着陸実証機「Smart Lander for Investigating Moon(SLIM)」に搭載し、月へ送る計画。
こうした要件を満たすロボットとして、宇宙航空研究開発機構(JAXA)、ソニー、同志社大学とSORA-Qを共同開発した。その際、玩具作りを通じてタカラトミーが獲得してきた小型化や軽量化、変形機構に関する技術を活用したという。
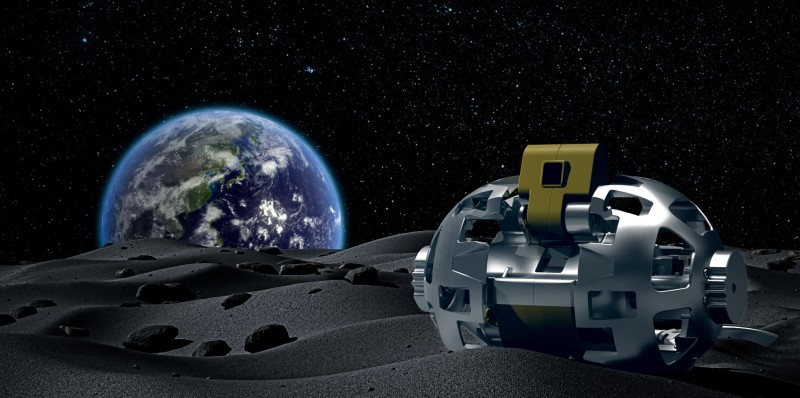
変形前のSORA-Qはほぼ球状で、サイズが直径約80mm、質量が約250g。輸送時の容積が小さくなり、着陸時の衝撃に強く、どの角度からでも展開して駆動開始できることから、球状にしたと説明する。


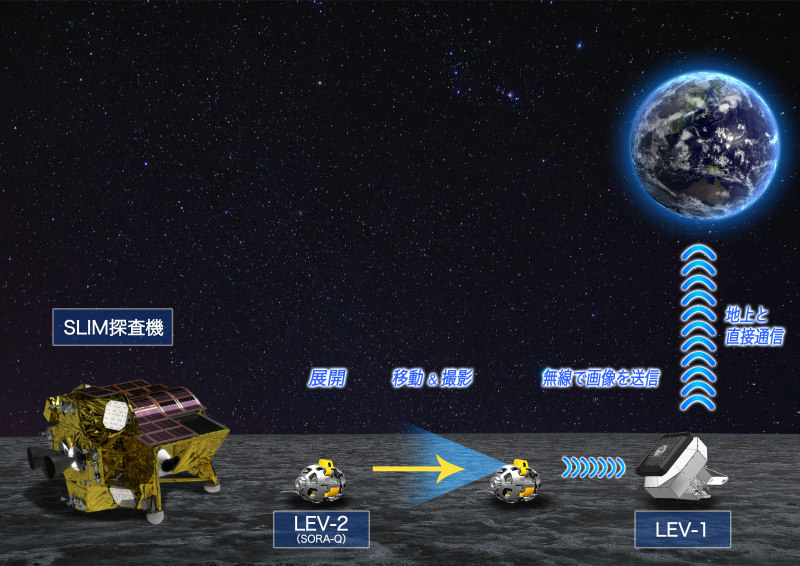
着陸したSLIMから月面に放出されると、球体だったSORA-Qは左右に拡張し、頭部が立ち上がり、スタビライザーとして機能する尻尾が伸びる、という変形をする。左右に拡張した部分を車輪として使って月面を移動する。車輪の回転軸は偏心しており、両輪が同じように回転する「バタフライ走行」で平地を、左右の回転タイミングがずれた「クロール走行」で傾斜地を走る。

前方を撮影する頭部のカメラと後方用カメラの2台を搭載。撮影した画像はSORA-Qが選別して、もう1台の月探査ロボット「LEV-1」へBluetoothで送る。LEV-1は、この画像を地球へ転送する。
SORA-Qは、一次電池の電力で機能する。電力は1時間から2時間程度で消費されてなくなり、活動停止する設計。
Related Articles
最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #AST SpaceMobile
- #ISS
- #NASA
- #SpaceX
- #Falcon 9
- #Rocket Lab
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Axiom Space
- #Crew Dragon
- #宇宙港
- #SPACE COTAN
- #HOSPO
- #天地人
- #JAXA
- #スカパーJSAT
- #HAKUTO-R
- #ispace
- #SLIM
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #Starliner
- #CCP
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #スペースデブリ
- #アストロスケール
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis I
- #Artemis II
- #宇宙なんちゃら こてつくん