


ニュース
ISS「きぼう」で物品を運び、船内を監視するロボットシステムを開発–地上から遠隔操作
2024.03.11 17:02



セック(東京都世田谷区)など4社は、国際宇宙ステーション(ISS)に運び込まれた物品を運んだり操作したりするロボットシステムの開発で宇宙航空研究開発機構(JAXA)に選定された。3月11日に発表された。
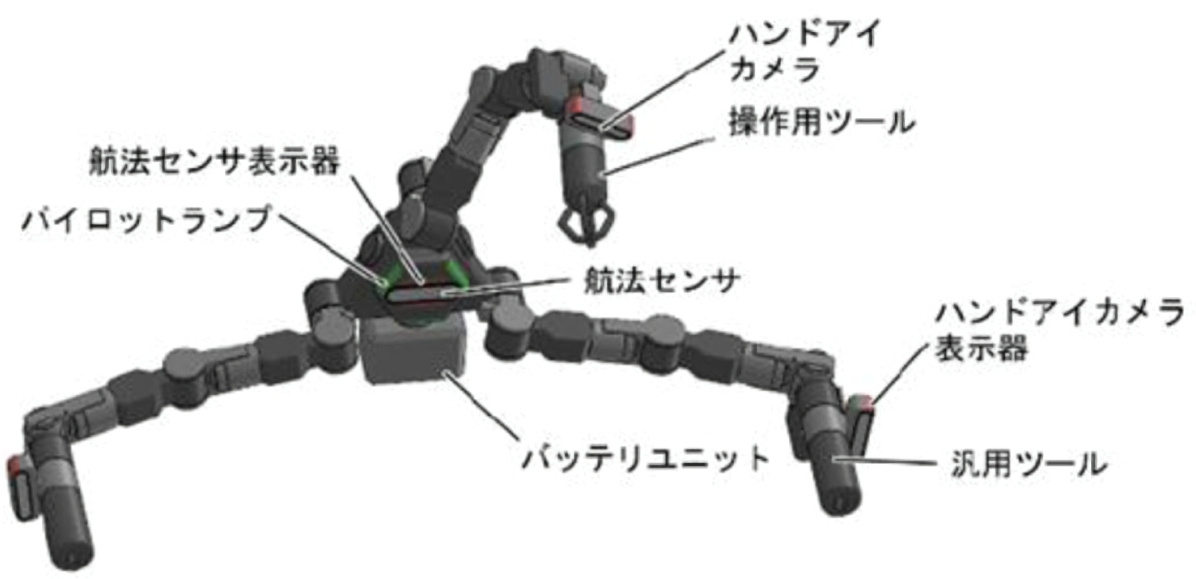
セックなどが開発するのは、ISSの日本実験棟(JEM)「きぼう」で動作する多肢ロボットを含むシステム(Payload ORganizarion and TRansportation System:PORTRS)。PORTRSは、地上から遠隔で操作し、「きぼう」に運び込まれた実験の試料(サンプル)などの物品を搬送したり操作したりするのに加え、船内の状態を確認、監視するといった作業を自動化する。ISS内部の作業を効率化するとともに宇宙飛行士の作業を軽減するのが目的。
今回の契約では、多肢ロボットを含むPORTRSのISSでの実証用システムを構築するとともにISSでの実証運用を支援する。
PORTRSの開発体制はセック、浜野製作所(東京都墨田区)、ウェルリサーチ(千葉県市原市)、コニカミノルタの4社。
セックはリアルタイム技術専門のソフトウェア開発企業。PORTRSでは、ソフトウェアを開発するとともに全体を統括。浜野製作所がメカトロニクス、ウェルリサーチがエレクトロニクス、コニカミノルタが物体認識技術をそれぞれ担当する。
セックは「きぼう」内部を動き回るカメラロボット「JEM自律移動型船内カメラ」2号機(Int-Ball2)の開発に協力。浜野製作所は遠隔操作ロボット「OriHime」や次世代型電動車椅子「WHILL」の開発を支援している。月面探査車(ローバー)用金属製タイヤをブリヂストンと共同で開発している。1996年設立のウェルリサーチは、宇宙機システムや装置の設計、解析を手掛けている。
Related Articles

![[フォトレポート]ジェームズ・ウェッブ宇宙望遠鏡が捉えた宇宙](https://uchubiz.com/wp-content/uploads/cnn_35213042_1280x960-2.jpg)


最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #Starlink
- #KDDI
- #天宮
- #中国
- #Artemis III
- #SLS
- #Blue Origin
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Axiom Space
- #Crew Dragon
- #SpaceX
- #ISS
- #宇宙港
- #HOSPO
- #SPACE COTAN
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #HAKUTO-R
- #SLIM
- #ispace
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Falcon 9
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #Rocket Lab
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #Intuitive Machines
- #CLPS
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん