


特集
【技術解説】地上にも応用される「宇宙ロボ技術」(前編)–研究が進む5つの要素技術を紹介
2023.08.09 13:00



この連載『事例で学ぶ、押さえておきたい「宇宙技術」トレンド』では、モノづくり企業と宇宙テック/宇宙ビジネスのつながりや活用事例を、4つの技術領域ごとに解説していきます。第3回となる今回のテーマは「宇宙技術の地上への波及:新たなビジネス機会を引き寄せる宇宙ロボティクス」です。前編では、研究開発が進む5つの要素技術を、後編では具体的な企業事例などを紹介します。
地上産業にも応用される「宇宙ロボティクス技術」
科学技術の進歩は、探査の舞台を地球から宇宙へと広げてきました。その最前線に立つのは、過酷な宇宙環境で活動するロボットたちです。さまざまなロボットが開発される中で、近年で特に印象的なのが、小惑星探査を行った「はやぶさ2」です。はやぶさ2は地球から約3億km離れた小惑星「リュウグウ」へと到達し、さらにサンプルを持ち帰るという困難な任務を達成しました。
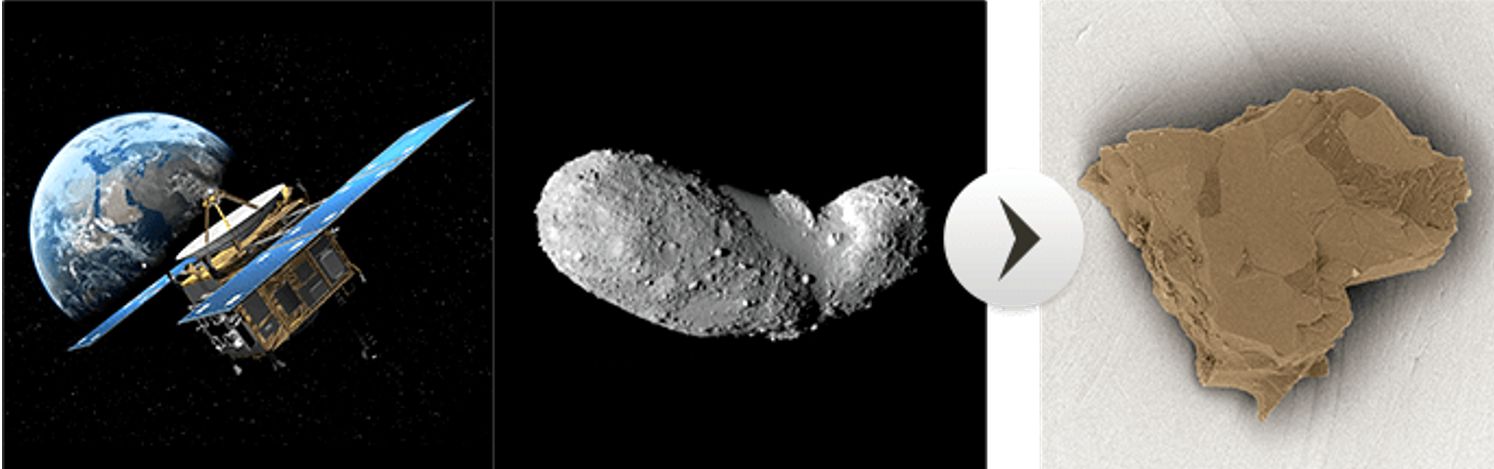
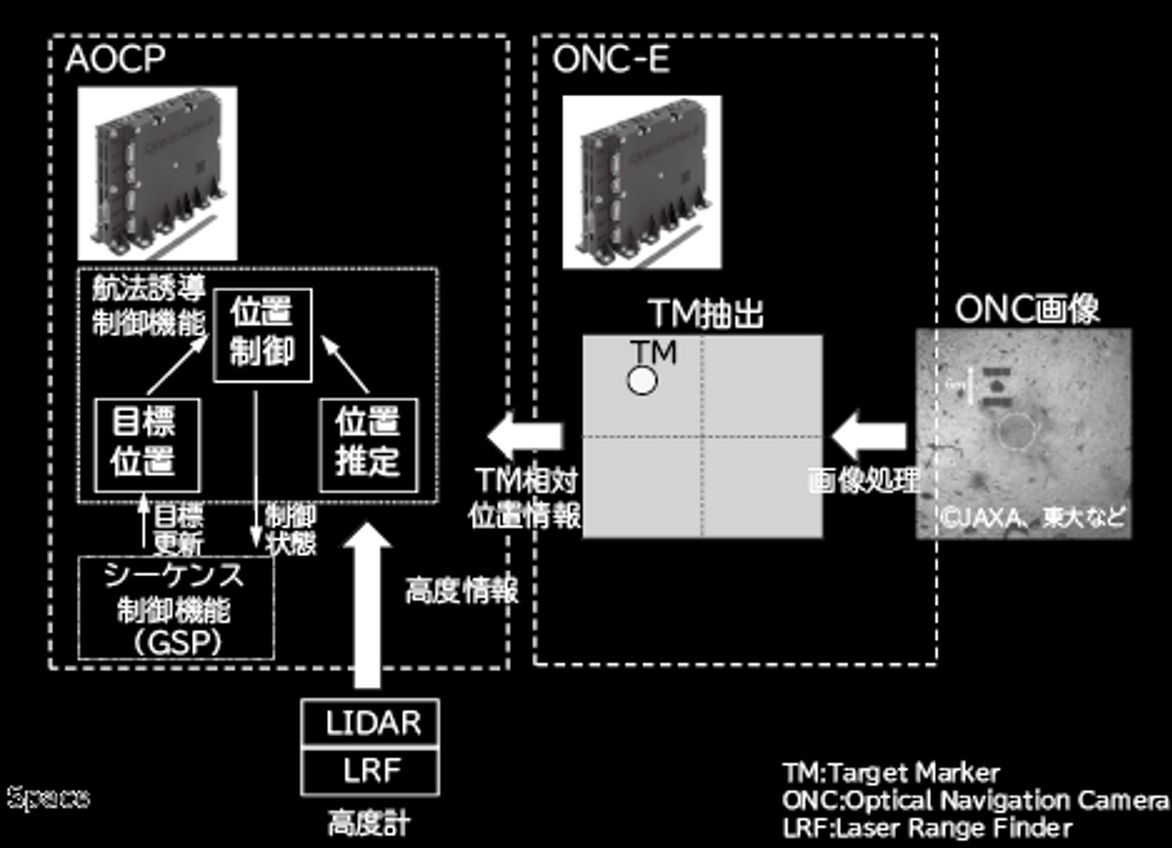
その成功に大きく貢献したのが「自律航法誘導制御システム」です。はやぶさ2はリュウグウに到着後、目標地点誤差約1mという高精度タッチダウンを実現しました。小惑星表面の厳しい環境条件や長い通信遅延時間を克服し、探査機が自律的に判断することが必須となる中で、自律航法誘導制御システムが主役を果たしました。
自律航法誘導制御システムは、標準的な航法誘導制御装置としての恒星センサーや化学推進系などの基本要素をはじめ、小惑星までの距離を測るレーザ測距装置や小惑星上のランドマークとなるターゲットマーカ、それを光らせるフラッシュランプなど、タッチダウン用の航法誘導制御装置を装備しています。これらの一連の装置とシステムが連携し、探査機が目標軌跡に沿った位置、姿勢に沿わせるような制御を行い、高精度タッチダウンを実現しました。
宇宙ロボティクス分野においては、制御システムの他にもさまざまな先端技術が開発、使用されており、地上の産業にも応用されています。この記事では、代表的な技術のいくつかについて、その先進的な事例とともにご紹介します。
【技術概要】宇宙ロボティクス技術において研究開発される要素技術
1. 制御システム
宇宙ロボティクスでは、無重力環境や微妙な力の制御を必要とする厳しい状況に対応するための精緻で先進的な制御システムが開発されています。たとえば、微小な力の変動による位置ズレを自動的に補正するフィードバック制御、振動や騒音を軽減するフィルタリング技術、精密な制御を可能にする最適制御理論などが用いられています。さらに、動作パターンを自律的に生成・調整する機械学習技術も宇宙ロボティクスにおける重要な要素となっています。
これらのシステムは、地上の精密機械や高度な自動運転車の制御システム、さらには生産ラインの自動化にも応用され、産業界の効率化と品質向上に深く寄与しています。
2. 自律性
宇宙環境で活動するロボットには、通信遅延や中断に対する耐性とともに、未知の状況に即座に対応できる自律性が求められます。この自律性は、機械学習やAI技術を組み合わせた先進的なアルゴリズムによって実現されています。たとえば、環境をリアルタイムで解析し適応的な行動を行う強化学習、未知の状況に対応するための予測モデリング、そして故障時に自己診断・修復を行うフォールトトレランスシステムなどが開発されています。
これらの技術は、遠隔医療から災害対応、環境調査まで、人間が直接介入することが困難な領域でのロボット活用を可能にし、社会の安全性と利便性の向上に寄与しています。
3. パワーシステム
持続的な活動を行う宇宙探査ロボットには、信頼性と効率性を兼ね備えたパワーシステムが必要です。具体的には、変動する太陽光の強度に対応した高効率なエネルギー変換を可能にする太陽電池、活動を安定化させる耐久性と信頼性に優れたバッテリー、ロボットの各システムに対して安定した電力を供給するための高効率な給電システムなどが必要となります。さらに、エネルギーの無駄を減らすために、発生する振動エネルギーや放出される熱エネルギーを回収し再利用するエネルギーハーベスティング技術も注目されています。
これらの技術は、地球上における再生可能エネルギー源の活用やエネルギー効率の高いデバイスの設計に寄与し、より持続可能な社会の実現へ貢献します。
4. ロボットアームとマニピュレータ
宇宙探査ロボットが遂行する多様なタスクは、特にロボットアームとマニピュレータという重要な部品により可能にされます。ロボットアームは人間の腕に相当する部分で、多数の関節とアクチュエータを持つことで無重力環境下でも正確で柔軟な動きを実現します。
一方、マニピュレータはロボットアームの先端部、つまり人間でいうところの手にあたる部分で、物体をつかむ、ボタンを押す、工具を操作するなどの詳細な作業を行います。これらの部品の設計においては、無重力環境下での動作や長期間にわたる劣化に対する耐性、そして打ち上げ時の重量制限に対応するため、素材選定から構造設計まで、細心の注意が払われています。
このような先進的な設計や製作技術は、医療分野のロボット手術、製造業の自動組み立てラインなど、地上での精密作業に幅広く応用可能です。
5. 極端条件対応材料
宇宙探査ロボットが直面する厳しい条件に対抗するための材料技術の核となる要素は、高温や低温、真空、放射線といった極端な環境に対応する材料の選択と設計です。たとえば、熱伝導率が低く、熱膨張率が小さい材料は高温環境や急激な温度変化に対応し、耐放射線性能を持つ材料は放射能に対する耐性を発揮します。さらに、微細な粒子からロボットを保護する防塵技術も重要な要素の1つです。 たとえば、月面のレゴリスなどは、その微細な粒子がロボットの内部に侵入し、動作を妨げ、性能を低下させる可能性があります。
こうした特殊な材料技術や防塵技術は、地球上でも特殊な作業環境や工業プロセス、粉塵環境での作業など、さまざまな場面で活用されています。
後編では、今回取り上げた宇宙ロボティクスの進歩を牽引する各先端技術について、具体的な事例に基づいて紹介します。
■アンケートのお願い
記事をご高覧いただき誠にありがとうございます。恐れ入りますが、今後のサービスの品質向上のため、皆様のご状況やご意見を伺いたく、こちらのアンケートにご協力いただければ幸いです。(回答所要時間:約1分)
■リンカーズについて
リンカーズはものづくり企業に向けたオープンイノベーション支援をしています。技術パートナー探索やユーザー開拓など、ものづくり企業の様々な課題に対してビジネスマッチングを軸にしたソリューションをご用意しております。本記事も、弊社のLinkers Researchをはじめとした調査活動で得た情報を活かして作成しております。Linkers Researchはお客様の業務目的に合わせたグローバル先端技術調査 サービスです。世界の先端技術動向を大企業・中小企業・スタートアップ・アカデミア問わず調査します。お問合せはこちら。
■著者について
蒲原 知宏
リンカーズ株式会社リサーチプラットフォーム事業本部 オープンイノベーション研究所プロジェクトマネージャー 博士(工学)
東京工業大学大学院 理工学研究科修了。東陽テクニカにて、自動車ソフトウェア向け静的コードチェッカーや大容量デジタルアセットの高速管理ソフトウェアの技術営業に従事。その後、シーメンスにて構造物振動計測・解析、および騒音源探査ソリューションのプリセールスを行う。2020 年よりリンカーズに入社し、オープンイノベーション研究所のプロジェクトマネージャーとして、自動車、建設、ヘルスケアなど、多岐にわたる最新技術動向調査を行う。
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #SpaceX
- #Falcon 9
- #Rocket Lab
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Crew Dragon
- #Axiom Space
- #ISS
- #HOSPO
- #SPACE COTAN
- #宇宙港
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #SLIM
- #HAKUTO-R
- #ispace
- #Starship
- #Super Heavy
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん