



ニュース
日本の月面着陸機「SLIM」とは–今夜月面着陸へ、JAXAが23時〜ライブ配信【動画アリ】
2024.01.19 08:01



日本の小型月着陸実証機「SLIM」(スリム)がいよいよ月面着陸に挑む。成功すれば旧ソ連、米国、中国、インドに続き世界で5カ国目。
本日(1月19日)22時40分頃に軌道高度の変更を開始し、1月20日午前0時に着陸降下を開始。同0時20分に月面着陸を予定する。着陸の模様は、宇宙航空研究開発機構(JAXA)の公式YouTubeチャンネルで23時からライブ配信される。
SLIMとは–世界初の「ピンポイント着陸」を実証
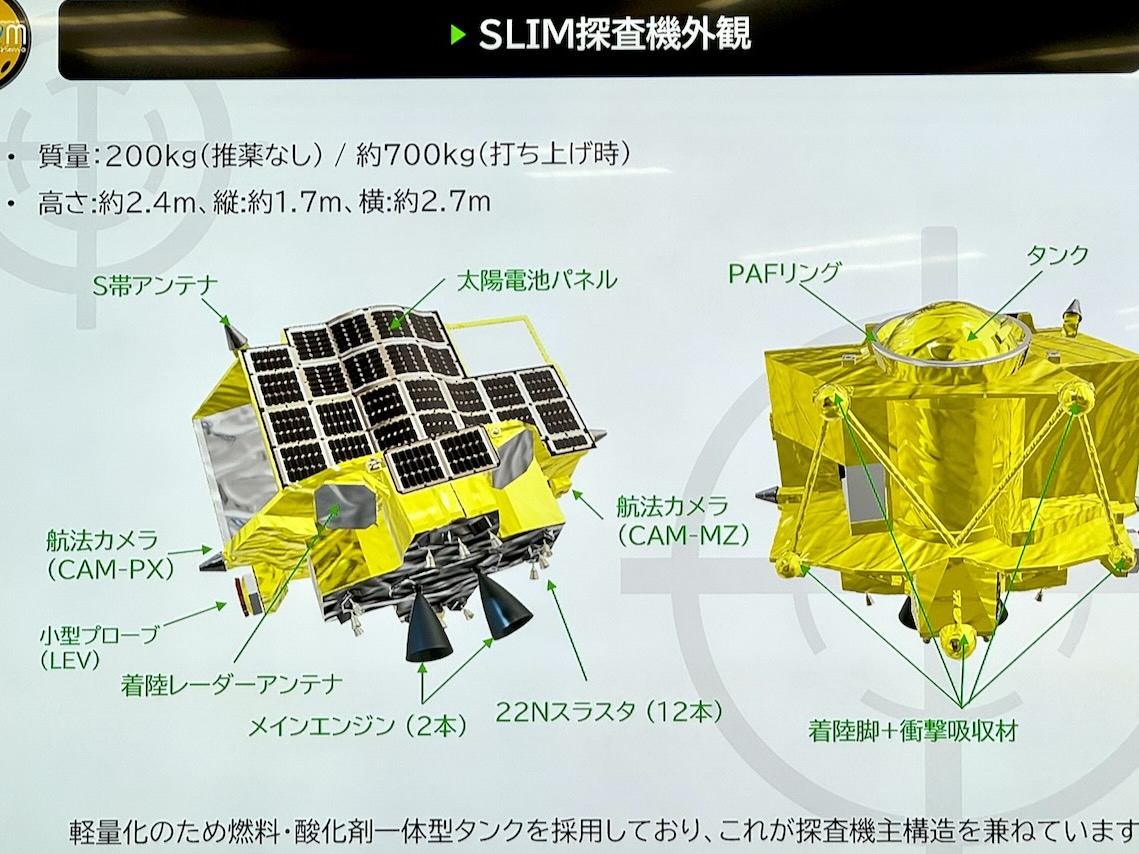
SLIM(Smart Lander for Investigating Moon)は国産基幹ロケット「H-IIA」47号機によって9月7日に打ち上げられた。
月面の狙った場所へのピンポイント着陸技術の実証を目的としており、着陸誤差は100m以内。これまでの月面着陸機の誤差は数km〜十数km以上であるため、驚異的な着陸精度となる。
このピンポイント着陸技術によって実現するのが、従来の「降りやすいところに降りる」から「降りたいところに降りる」探査への転換だ。
月惑星の資源探査では、軌道上からリモートセンシングで資源分布を推定し、その後実際に地面を探査することになる。その際に「狙った場所に降りる」技術が重要になるというわけだ。
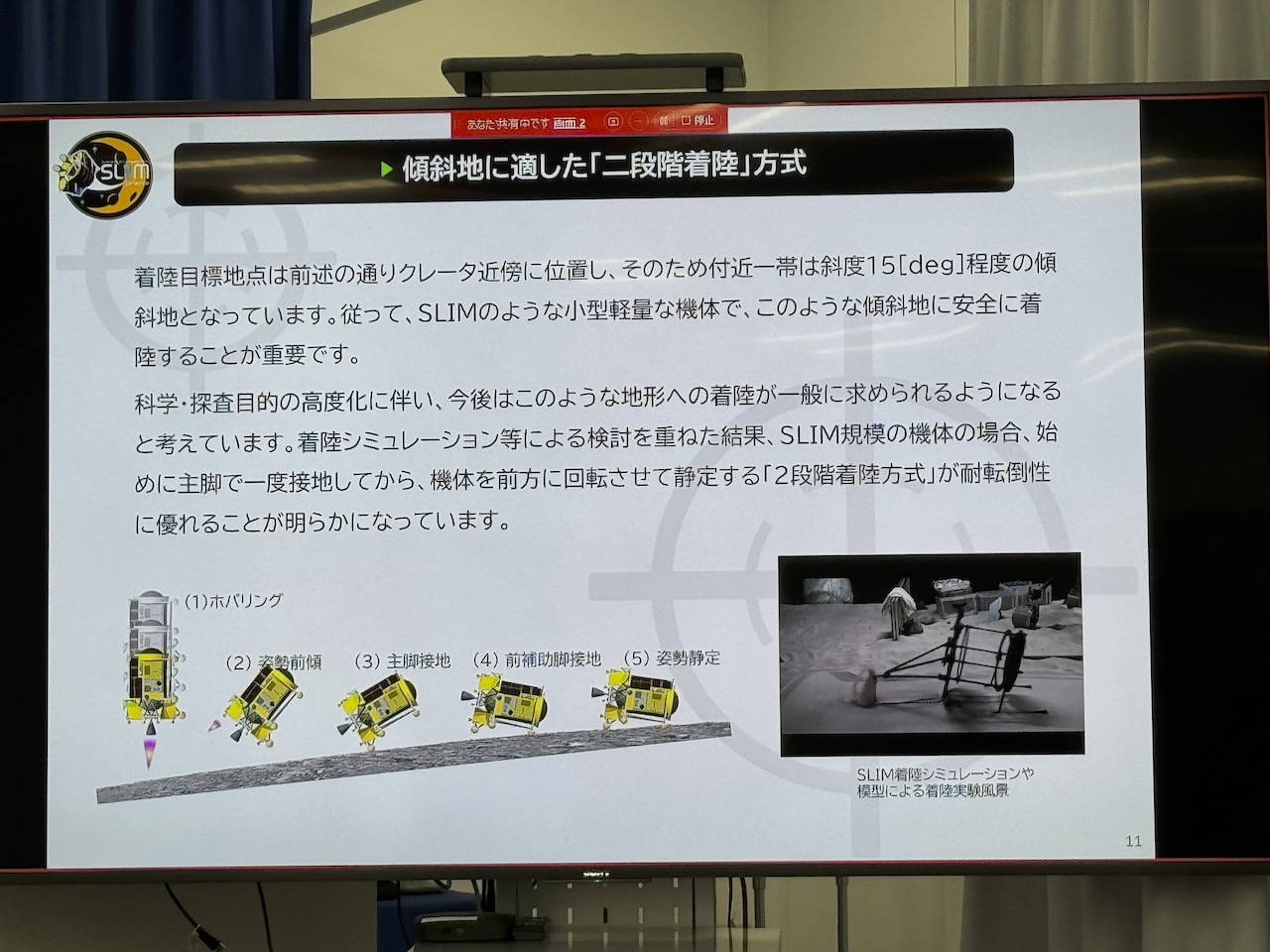
なお、SLIMの着陸地点はクレーター付近であることから、15度程度の斜面となっている。そこでSLIMは「二段階着陸」方式を採用。一度接地してから、斜面に向かって倒れ込むように着陸することで成功確率を高めている。
2つの子機を展開
SLIMのミッションでは、着陸時に2つの子機を月面へ展開する計画だ。
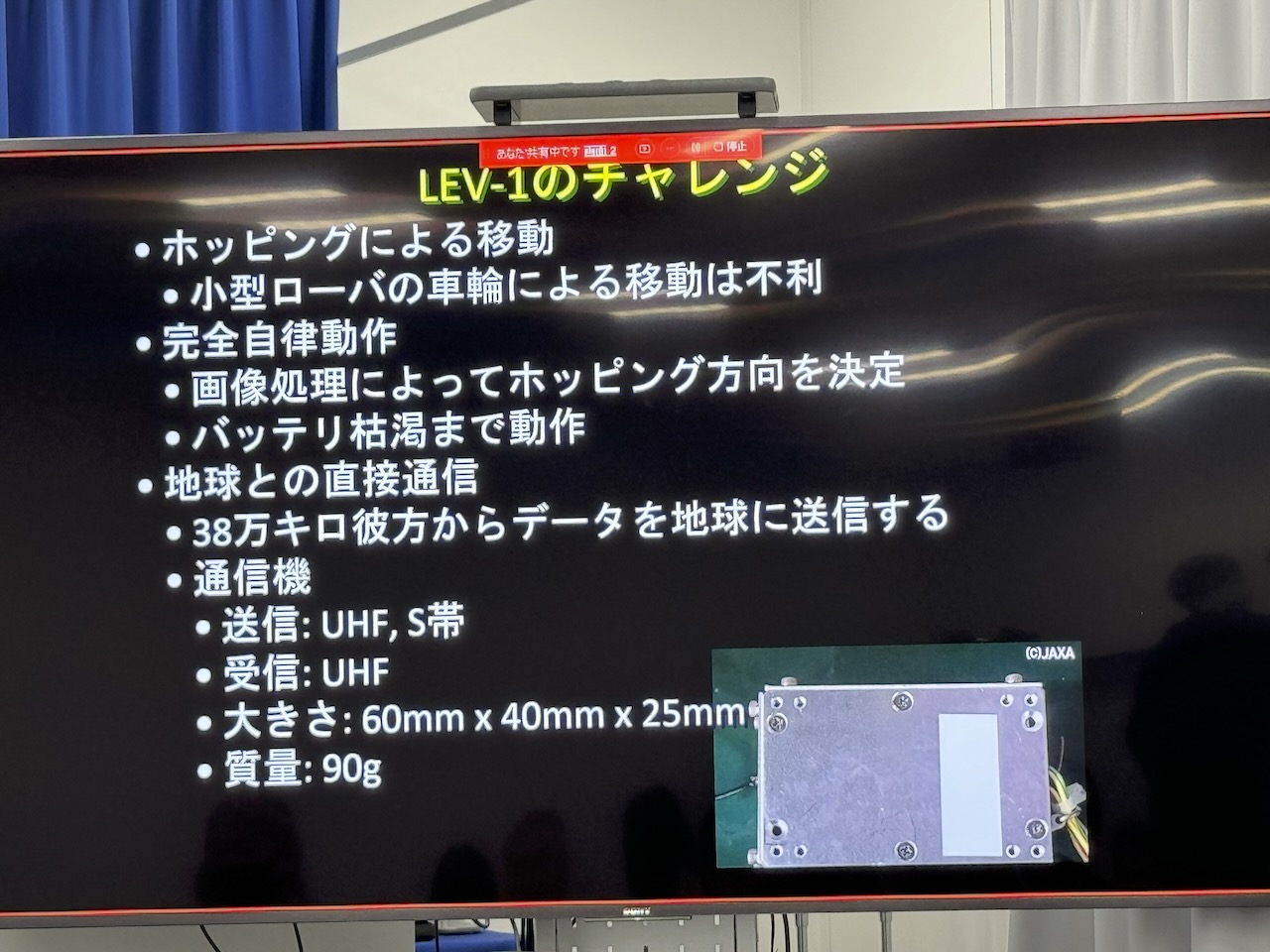
1つ目は、月面を車輪ではなくホッピングで移動する超小型月面探査ローバー「LEV-1」だ。展開後は月面上からSLIMを撮影し、ピンポイント着陸の成否を判断する材料とする。

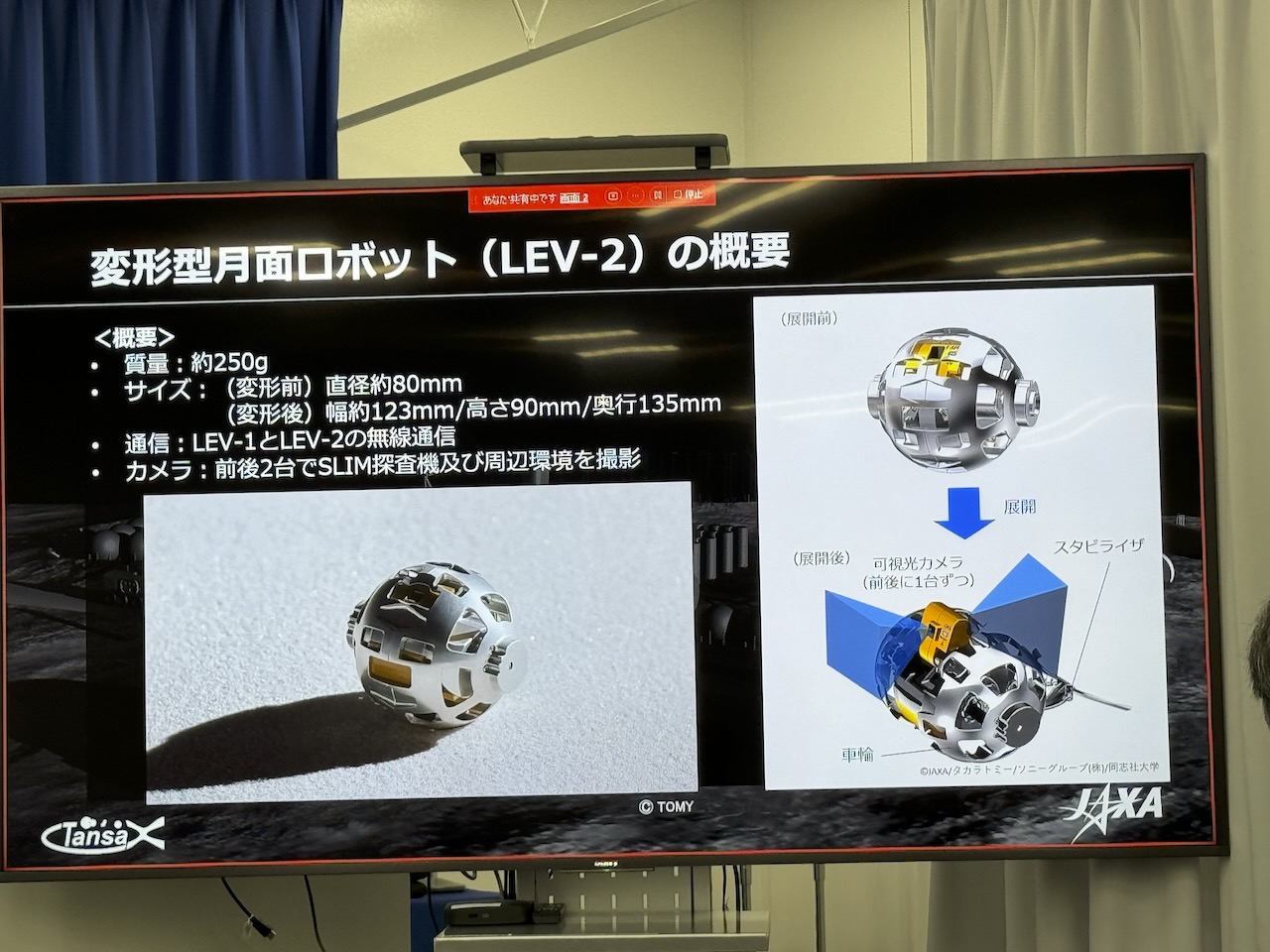
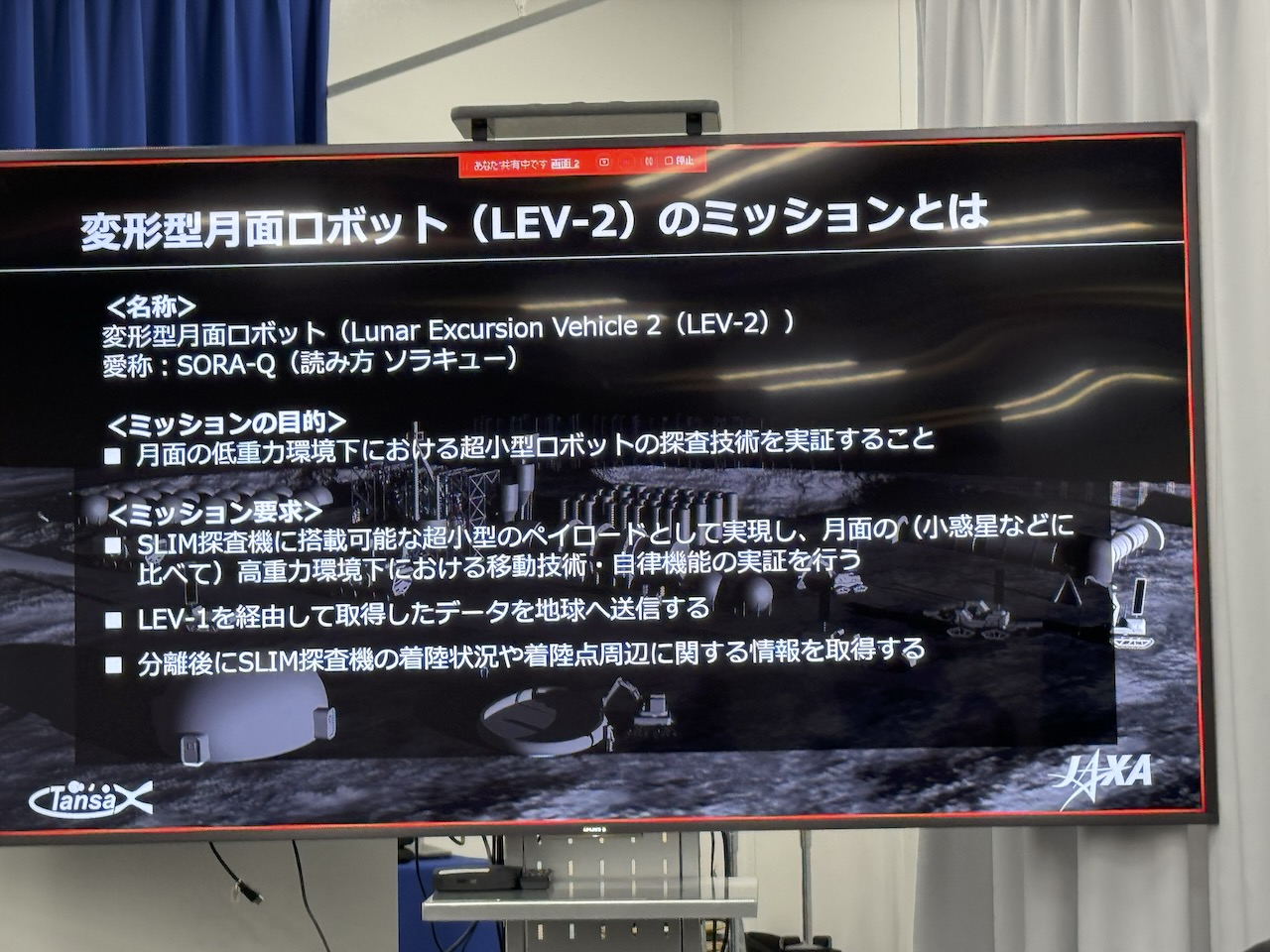
2つ目は玩具メーカーのタカラトミーと共同開発した「変形型月面ロボット(LEV-2)」で、愛称は「SORA-Q」(ソラキュー)。月面では変形機構で車輪を展開する。左右の回転する車輪を偏心させることで、月の砂(レゴリス)上での移動や、障害物を乗り越えることもめざす。
「月は地球から分離した説」を検証
SLIM本体は1月20日の月面着陸で、「栞(しおり)クレーター」付近に着陸する計画だ。同地点には「月のマントル」に由来するカンラン石が散らばっている。SLIMは着陸後、搭載するマルチバンド分光カメラでカンラン石の組成分析を予定している。
なぜカンラン石を分析するのか。それは月の起源を探るためだ。月が形成された理由としては現在「ジャイアント・インパクト説」が有力視されている。同説は、約46億年前の原始地球に火星程度の原始惑星が衝突し、その際に飛び出た地球の一部が再結合して、現在の月になったという説だ。
そこで、月のマントルに由来するカンラン石の組成を分析し、その結果を地球のマントルと比較することで、ジャイアント・インパクト説を検証するというわけだ。
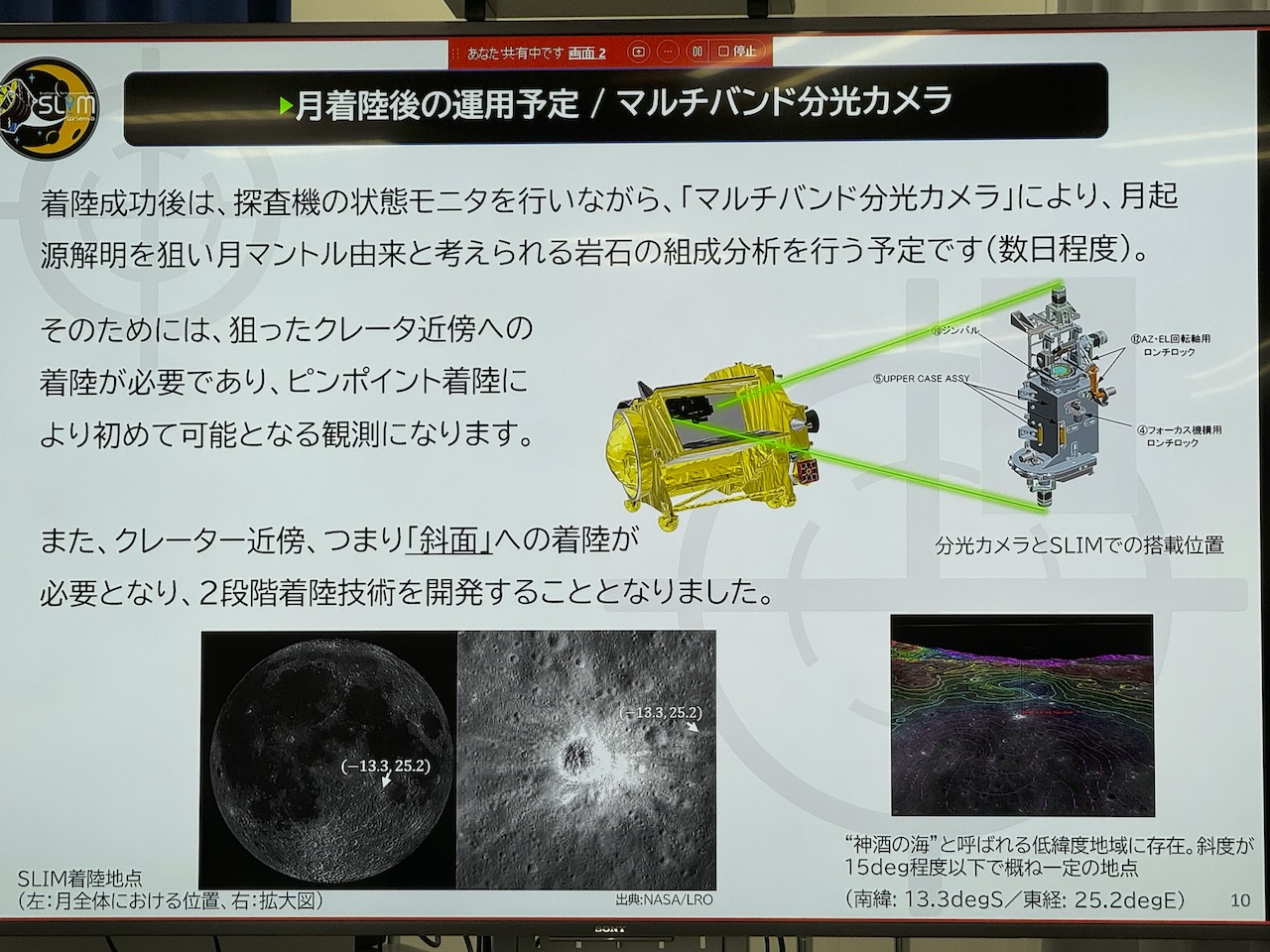
なお、カンラン石は比重が大きいために、通常は地下深くに埋まっている。一方、地表に露出したカンラン石は、クレーター付近に多く存在する。これはクレーター形成時に、衝撃で地下から掘り起こされたものと考えられている。
JAXAは2007年に打ちげた月周回衛星「かぐや(SELENE)」で月面のリモートセンシングを実施し、月面におけるカンラン石の分布を突き止めた。
また、組成分析にあたっては宇宙線の影響の少ないカンラン石を用いる必要があり、宇宙線の影響をあまり受けていない若いクレーターを探す必要がある。その結果、SLIMの探査地点を栞クレーターに定められた。前述の「二段階着陸技術」も、地表にカンラン石が露出しているとみられるクレーター付近の斜面に着陸するために考案されたというわけだ。
「これまでアポロ計画をはじめ、月の岩石が持ち帰られてきたが、残念ながらSLIMで見ようとしているマントル由来のカンラン石はなかった」──。JAXAの宇宙科学研究所 SLIMプロジェクトチームでプロジェクトマネージャーを務める坂井真一郎氏はこのように語った。
Related Articles


最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #中国
- #天宮
- #SLS
- #Artemis III
- #サブオービタル
- #Blue Origin
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Crew Dragon
- #SpaceX
- #Axiom Space
- #ISS
- #宇宙港
- #SPACE COTAN
- #HOSPO
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #SLIM
- #ispace
- #HAKUTO-R
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #KDDI
- #インターステラテクノロジズ
- #Starlink
- #Falcon 9
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #Rocket Lab
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #Intuitive Machines
- #CLPS
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん