


ニュース
月を目指す「HAKUTO-R」、初回の軌道制御マヌーバが成功–全ペイロードも確認
2022.12.16 17:51



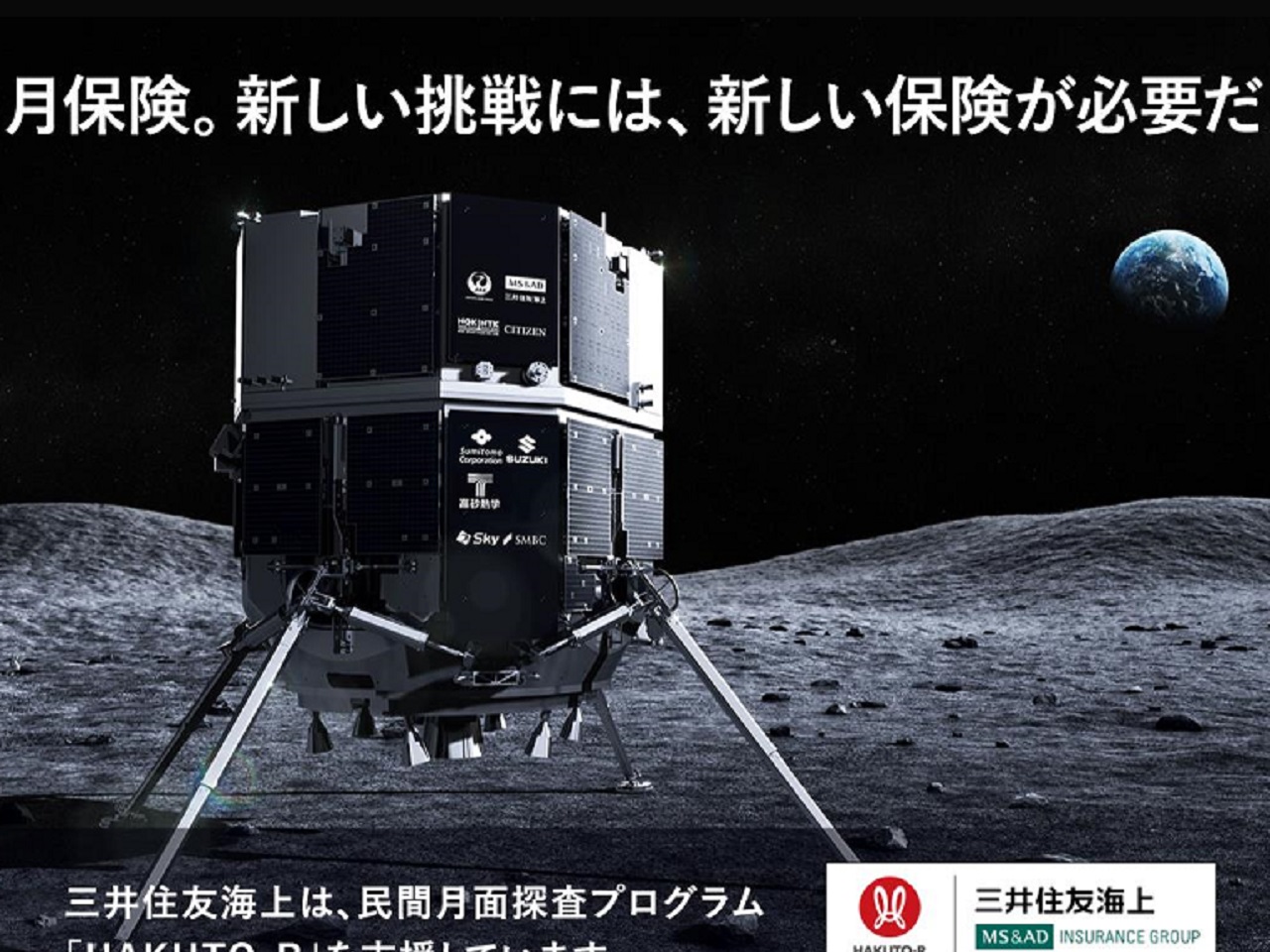
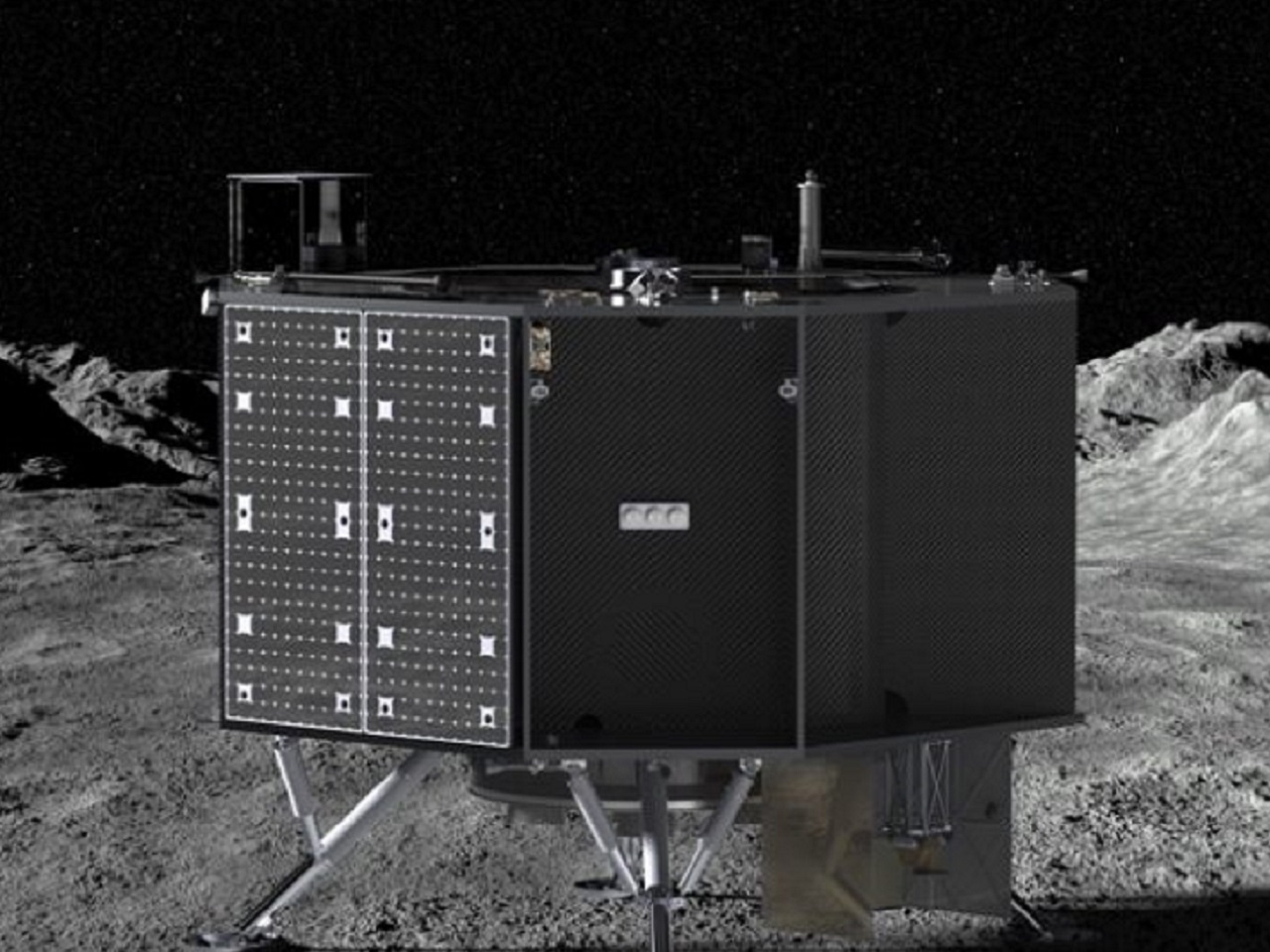
ispace(東京都中央区)は、民間月探査プログラム「HAKUTO-R」ミッション1で打ち上げた月着陸船(ランダー)について、初回の軌道制御マヌーバを実施して予定軌道へ投入した。主推進系と誘導制御系の正常動作も確認している。
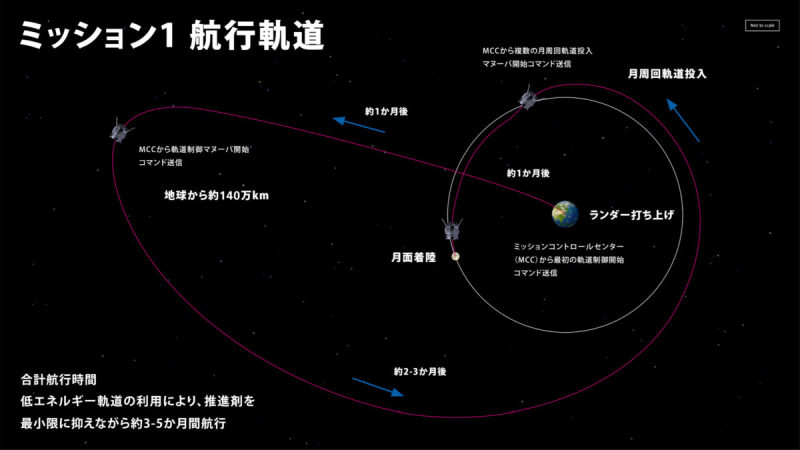
ミッション1のランダーは、Space Exploration Technologies(SpaceX)のロケット「Falcon 9」に搭載され、米フロリダ州ケープカナベラル宇宙軍基地から12月11日に打ち上げられた。現在、地球から約55万kmの地点を航行しており、2023年1月20日ごろには地球から約140万km離れた地点まで到達する見通し。
その後、マヌーバを随時実施し、月周回軌道に入る計画。最終的に、2023年4月末の月面着陸を目指す。
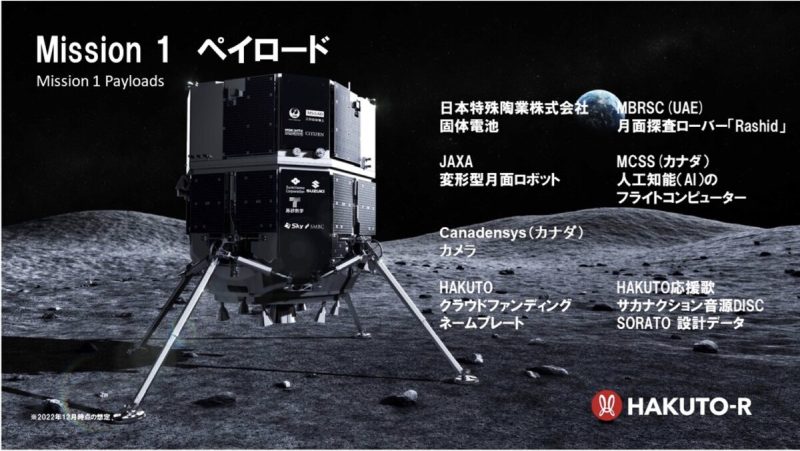
搭載している貨物(ペイロード)は、すべて不備がないと確認できた。各ペイロードの温度や姿勢、電源供給、通信は正常で、計画通りペイロードの運用が可能という。搭載しているペイロードは、以下の7個。
- 日本特殊陶業の固体電池
- ドバイ首長国政府宇宙機関ムハンマド・ビン・ラシード宇宙センター(Mohammed Bin Rashid Space Centre:MBRSC)の月面探査ローバー「Rashid」
- 宇宙航空研究開発機構(JAXA)の変形型月面ロボット「SORA-Q」
- カナダMission Control Space Servicesの人工知能(AI)フライトコンピューター
- カナダCanadensys Aerospaceのカメラ
- HAKUTO-Rの前身プロジェクト「HAKUTO」のクラウドファンディング支援者の名前が刻印されたパネル
- HAKUTOアンバサダーだったロックバンド、サカナクションによるHAKUTO応援歌「SORATO」とHAKUTOのフライトモデル「SORATO」の設計データを格納したディスク
ミッション1では、打ち上げから着陸までの間に10段階のマイルストーンを設定しており、それぞれに設けたサクセスクライテリアを達成することを目指している。
ミッションの途中で何らかの課題が発生した場合でも、その時点までに得たデータやノウハウなどの成果を正確に把握した上で、2025年までに後続するミッション2、「Artemis」計画に貢献するというミッション3へとフィードバックし、技術と事業モデルの信頼度と成熟度を商業化に足る水準にまで高めることを計画している。
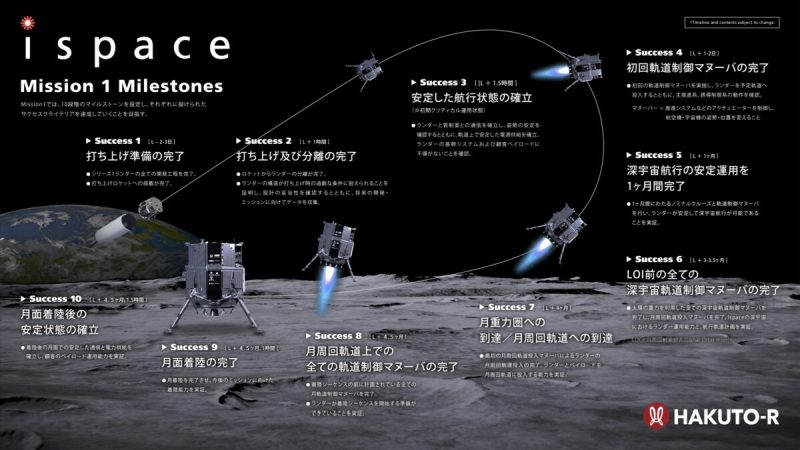
今回、ペイロードに不備がないことを確認できたことで「サクセス3」、初回の軌道制御マヌーバが完了したことで「サクセス4」をそれぞれ実現できたことになる。
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #SpaceX
- #Falcon 9
- #Rocket Lab
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Crew Dragon
- #Axiom Space
- #ISS
- #HOSPO
- #SPACE COTAN
- #宇宙港
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #SLIM
- #HAKUTO-R
- #ispace
- #Starship
- #Super Heavy
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん