



ニュース
「HAKUTO-R」ミッション1打ち上げ成功、民間企業による世界初の月面着陸へ
2022.12.12 07:30



ispace(東京都中央区)は12月11日、民間月探査プログラム「HAKUTO-R」ミッション1の打ち上げに成功した。月着陸船(ランダー)はSpace Exploration Technologies(SpaceX)のロケット「Falcon 9」に搭載され、米フロリダ州ケープカナベラル宇宙軍基地から打ち上げられ、宇宙に飛び立った。月への着陸は2023年4月末を予定している。
ミッション1の打ち上げはもともと11月28日に予定されていたが、Falcon 9の追加点検作業などから延期となっていた。
HAKUTO-Rは2025年までに3回の月面着陸ミッションを予定しており、独自のランダーと月面探査車(ローバー)を開発して、地球-月輸送サービスの技術検証を目的としている。商業利用の可能性から多くのパートナー企業が参画している。
今回のミッション1を含めて全3回のミッションでランダーとローバーの設計と技術を検証するとともに、月面輸送サービスや月面データサービスの提供という事業モデルも検証して、信頼度や成熟度を、商業化にふさわしい水準まで高めることを計画している。
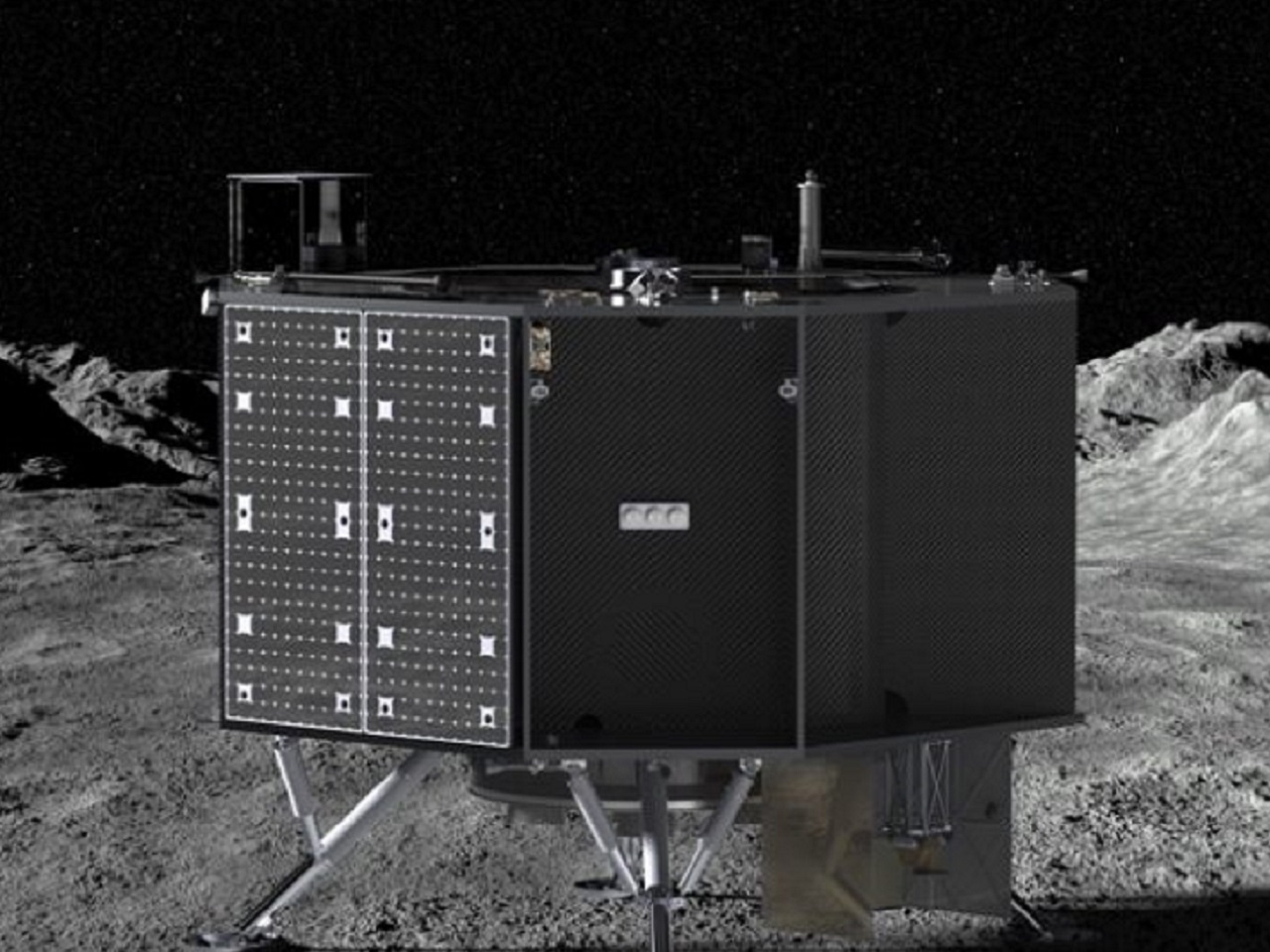
今回の打ち上げは今後の月輸送の商業化のための第一歩であり、ビジネスとして国内外の企業や法人から貨物(ペイロード)を預かり、月に輸送することになる。今回のランダー(ispaceでは「シリーズ1ランダー」と呼んでいる)に搭載されているペイロードは以下の通り。
- 日本特殊陶業の固体電池
- ドバイ首長国政府宇宙機関ムハンマド・ビン・ラシード宇宙センター(Mohammed Bin Rashid Space Centre:MBRSC)の月面探査ローバー「Rashid」
- 宇宙航空研究開発機構(JAXA)の変形型月面ロボット「SORA-Q」
- カナダMission Control Space Servicesの人工知能(AI)フライトコンピューター
- カナダCanadensys Aerospaceのカメラ
- HAKUTO-Rの前身プロジェクト「HAKUTO」のクラウドファンディング支援者の名前が刻印されたパネル
- HAKUTOアンバサダーだったロックバンド、サカナクションによるHAKUTO応援歌「SORATO」とHAKUTOのフライトモデル「SORATO」の設計データを格納したディスク
打ち上げ日の12月11日に、同社は午後4時から打ち上げ発表会を開催。発表会に登壇した宇宙飛行士の山崎直子氏は「これだけのペイロードを搭載しているが、特に期待したいのは固体電池」と言及した。

現在の宇宙開発では、電力源としてリチウムイオン電池が活用されているが、適応できる温度の範囲が狭いため、ヒーターを搭載したり熱放出を工夫したりといった付属機構が不可欠とされている。月面での夜間、極地方ではマイナス150度以下であり、液体のリチウムイオン電池の電解液が凍結してしまうため、従来の熱設計では適応できないと指摘されている。
こうしたことから日本特殊陶業は、固体電池の研究、開発を独自に進めていて、月面での技術実証実験を行う運びとなった。成果次第では、今後の月面探査などで電力源の課題を解決できる第一歩になり得る。
打ち上げられたランダーは5カ月間宇宙を航行して、2023年4月末に月面に着陸する予定。
地球から月は38万km離れているが、ランダーは地球から150万km離れたところまで航行する。これは、できるだけ消費するエネルギーを低く抑えるために低エネルギー軌道を利用するためだ。

ispaceでランダーの設計開発を担当した日達佳嗣氏は「低エネルギー遷移軌道は太陽の引力を利用する。月に行くのに、月よりも5倍離れた場所まで航行して回り道をすることになる」と解説した。
今回打ち上げが成功したミッション1では、打ち上げから月面着陸までの間で10段階のマイルストーンを設定、マイルストーンごとの成功基準(サクセスクライテリア)も設定している。
ミッション途中で課題が発生して、すべてのマイルストーンを達成できない可能性もあるが、その事象だけを捉えて単なる失敗と評価せずに、発生した課題と、それまでに得られたデータやノウハウなどの成果を正確に把握して、次のミッションにつなげていくことが持続可能な技術進化と事業モデルに必要と解説している。ミッション1の10のマイルストーンは以下の通り。
- 打ち上げ準備の完了
- ランダーのすべての開発工程を完了
- 打ち上げロケットへの搭載が完了
- 打ち上げと分離の完了
- ロケットからランダーの分離が完了
- ランダーの構造が打ち上げ時の過酷な条件に耐えられることを証明し、設計の妥当性を確認するとともに、将来の開発やミッションに向けてデータを収集
- 安定した航行状態の確立
- ランダーとの通信を確立し、姿勢の安定を確認するとともに、軌道上で安定した電源供給を確立。ランダーの基幹システムとペイロードに不備がないことを確認
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #Starlink
- #KDDI
- #天宮
- #中国
- #Artemis III
- #SLS
- #Blue Origin
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Axiom Space
- #Crew Dragon
- #SpaceX
- #ISS
- #宇宙港
- #HOSPO
- #SPACE COTAN
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #HAKUTO-R
- #SLIM
- #ispace
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Falcon 9
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #Rocket Lab
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #Intuitive Machines
- #CLPS
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん