


ニュース
GITAI、「シャクトリムシ」型ロボットアーム開発–移動して複数のツールで作業
2022.08.17 11:51



宇宙用汎用作業ロボットを開発するGITAI Japan(東京都大田区)は8月17日、「シャクトリムシ」型ロボットアーム「GITAI Inchworm One(IN1)」を開発したと発表した。
国際宇宙ステーション(ISS)の老朽化に伴い、民間による宇宙ステーションの建設が複数発表されるほか、月面への有人宇宙飛行、さらにはその先の月面基地建設に関しても、複数の具体的なプロジェクトが進行している。
宇宙での開発作業が本格化する中、宇宙環境下でロボットに求められる作業内容は多様化、複雑化していることから同社は、複数の仕事を実施できる「タスク性能」、広範囲に仕事を行える「移動性能」の2つの課題を解決可能な自律ロボットアームとしてGITAI IN1を開発した。
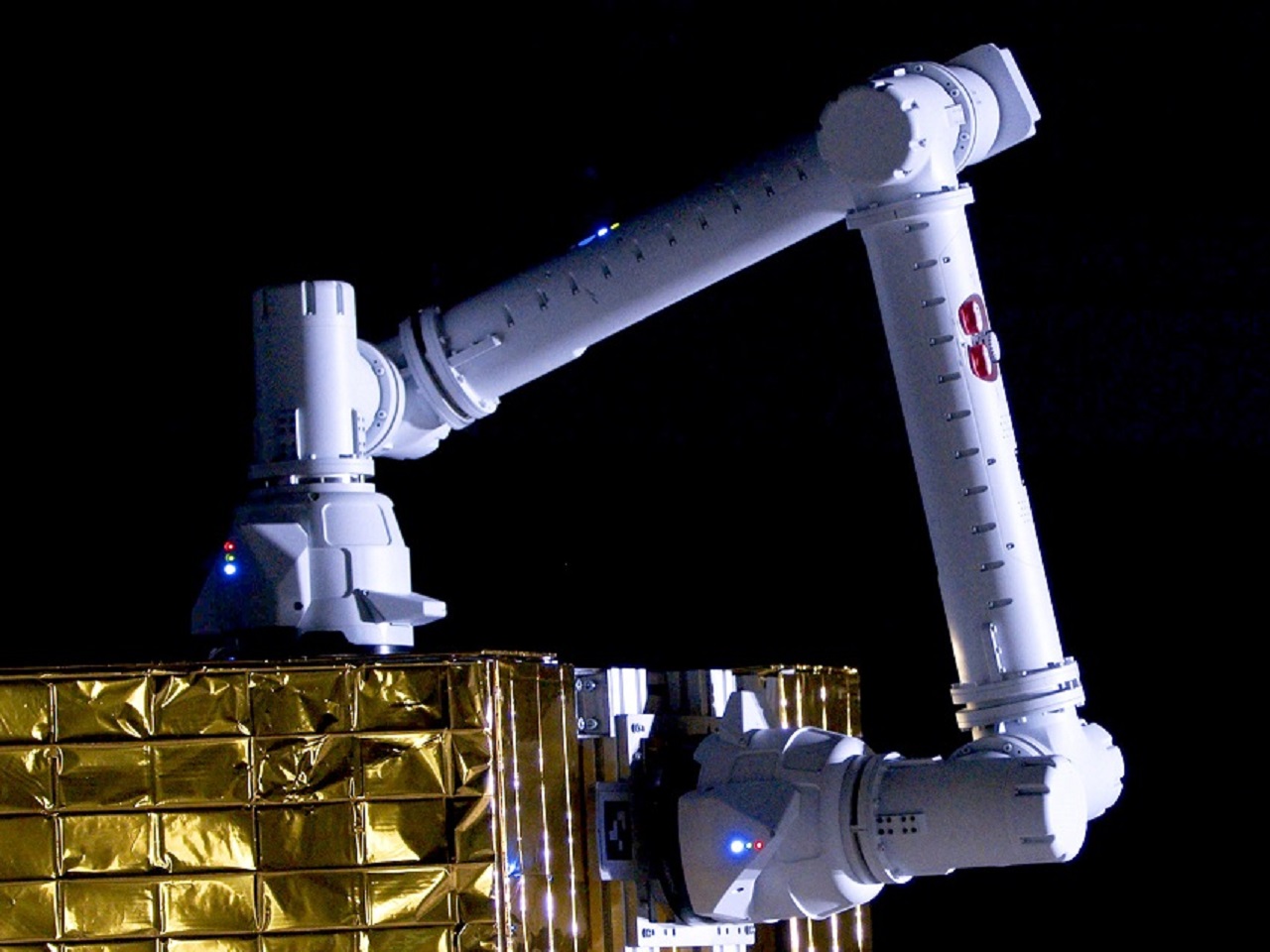
GITAI IN1は、アームの両端にロボットアームの手先を交換(着脱)可能にするためのインターフェース「グラップルエンドエフェクタ」を搭載。
グラップルエンドエフェクタは、その嵌合(かんごう)相手となる「グラップルフィクスチャ」と接続した際、機械結合や電力結合、通信結合の機能を備え、エンドエフェクタ・ツールなどの操作が可能になると説明する。
グラップルエンドエフェクタで1台のロボットアームに対しさまざまなエンドエフェクタやツールを切り替えることで、複数の仕事を実施することが可能な「タスク性能」を実現するという。

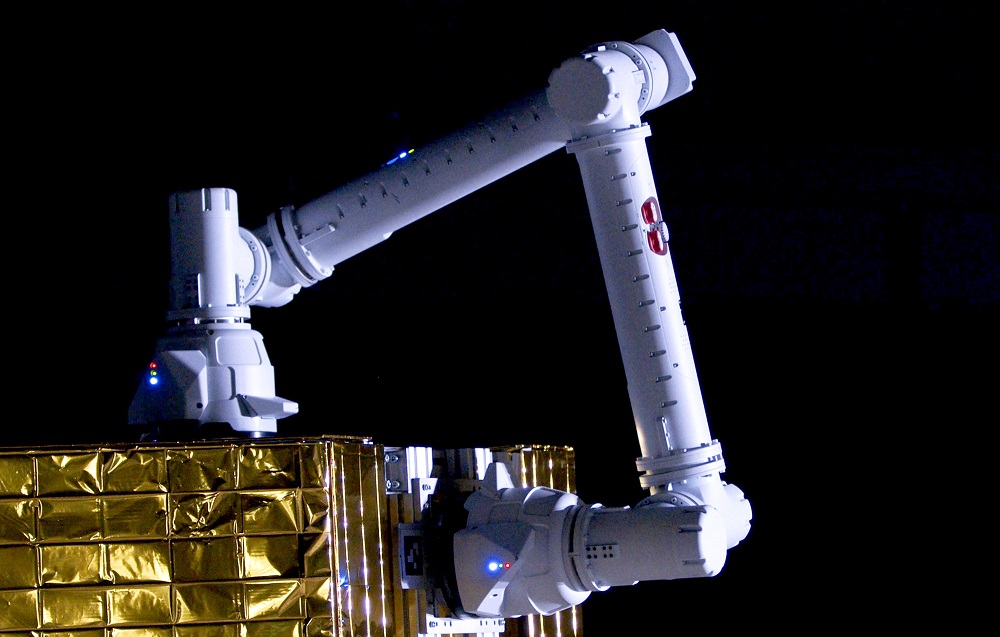
人工衛星や探査車(ローバー)などの移動体壁面に設置されたグラップルフィクスチャと嵌合することで、移動体上を自由に移動可能、グラップルフィクスチャを建造物などに設置することで、ロボットアームの移動範囲を上下左右と無限に広げられるとしている。
グラップルフィクスチャに充電機能を備えることで、ロボットアーム自身が移動しながら充電することも可能となり、GITAI IN1は広範囲にて仕事を行える「移動性能」を実現していると解説する。
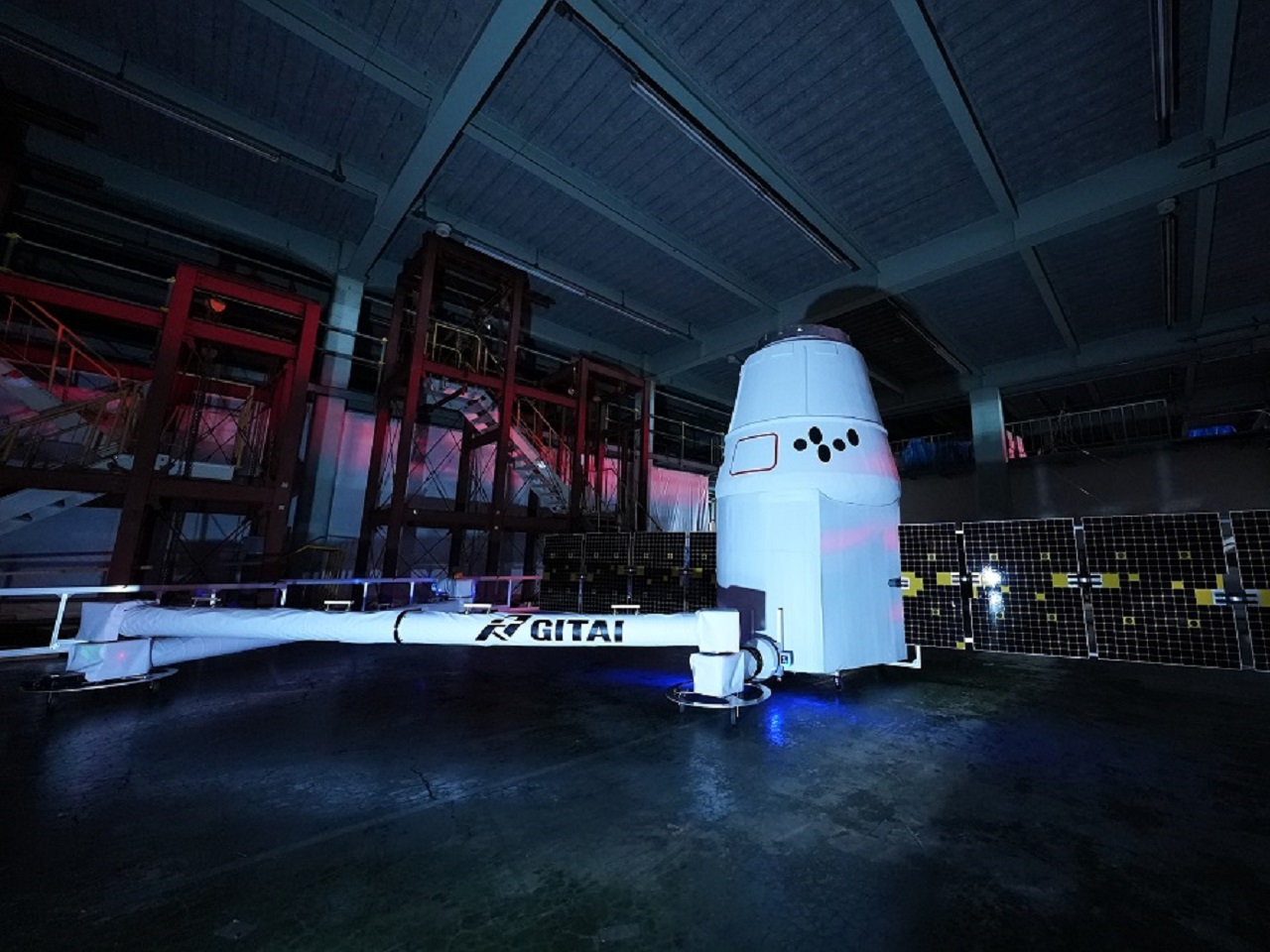
同社によると、すでに発表済みの月面作業用ロボットローバー「GITAI R1」と協調することで、NASAの技術成熟度レベル(Technology Readiness Levels、TRL)における「レベル 3」(TRL 3、技術実証のデモンストレーション)に対応する各種試験に成功しているという。
具体的には、JAXA相模原の模擬月面環境でGITAI IN1自身が自律移動して月面着陸機からローバーに乗り移り、作業地点まで移動して所定の作業を行った後、再び月面着陸機に戻る「移動性能」の検証を実施した。
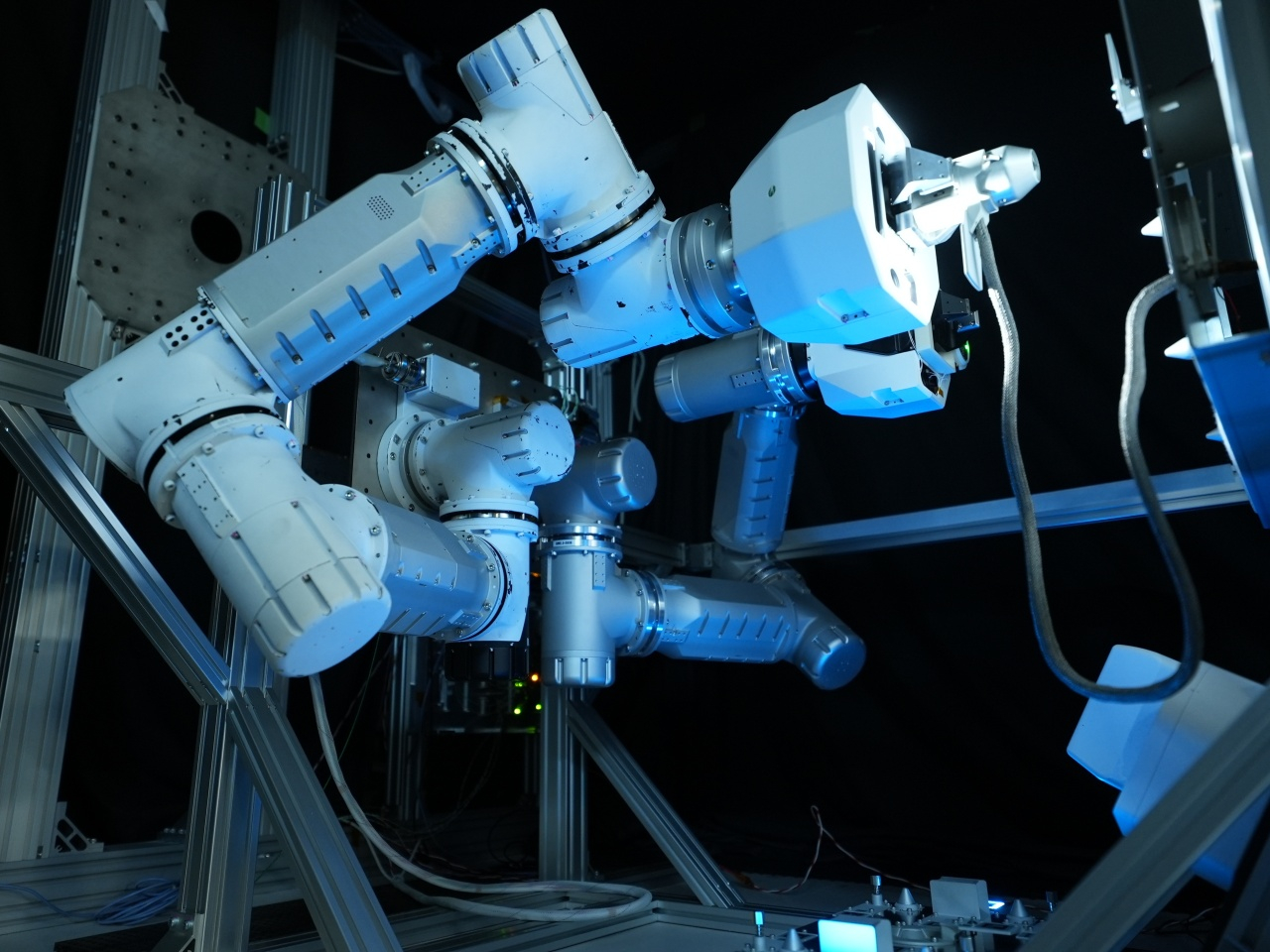
月面資源採取作業を想定し、切削工具を使った資源サンプルの破壊、シャベルを使った資源サンプルの回収、牽引車を使った資源サンプルの運搬など、一連の作業を複数のツールを使い分けながら実現する「タスク性能」を検証し、それぞれ各種試験に成功したとしている。
同社では、すでに発表済みの2m級自律ロボットアーム「GITAI S2」や10m級大型自律ロボットアーム「GITAI S10」と同様、GITAI IN1では地上でのシステムとしての技術成立性を確認できる「TRL 6」、宇宙空間でのシステムとしての技術成立性を確認できる「TRL 7」の早期の達成を目指し、開発を進めるとしている。
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #Starlink
- #KDDI
- #天宮
- #中国
- #Artemis III
- #SLS
- #Blue Origin
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Axiom Space
- #Crew Dragon
- #SpaceX
- #ISS
- #宇宙港
- #HOSPO
- #SPACE COTAN
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #HAKUTO-R
- #SLIM
- #ispace
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Falcon 9
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #Rocket Lab
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #Intuitive Machines
- #CLPS
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん