



ニュース
GITAI、10m級大型自律ロボットアームを開発–宇宙ステーションでの利用を想定
2022.08.04 12:28



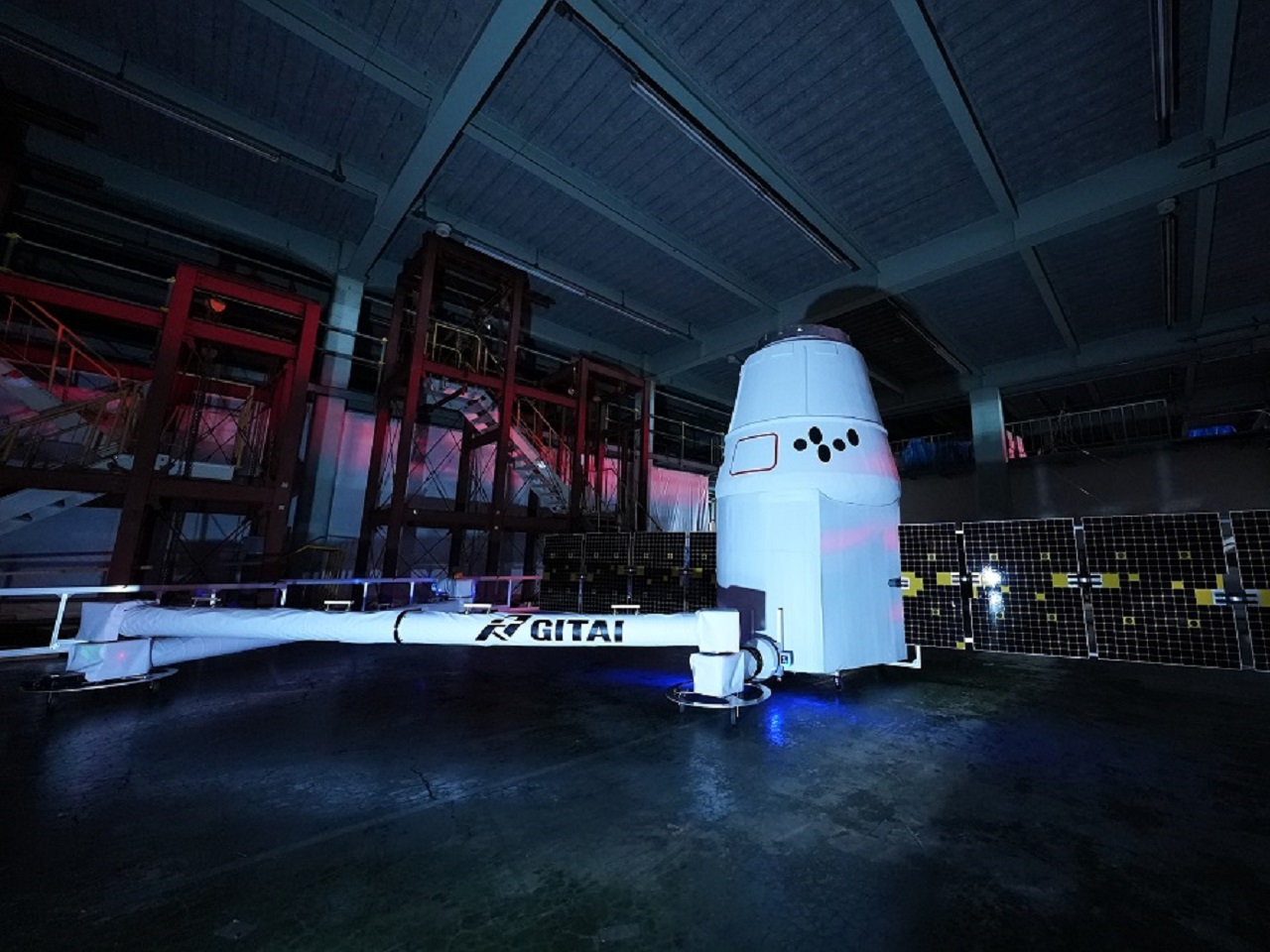
GITAI Japan(東京都大田区)は8月4日、宇宙ステーション向けの10m級大型自律ロボットアーム「GITAI S10」を開発したと発表した。
米航空宇宙局(NASA)の技術成熟度レベル(Technology Readiness Level:TRL)におけるレベル3(TRL 3、技術実証のデモンストレーション)に対応する各種試験に成功しており、宇宙ステーションでの大型モジュール建設や貨物輸送機とのドッキングなどでの使用を想定しているという。

同社によると、近年の世界の宇宙開発競争の激化に伴い、人工衛星に対する燃料補給や修理、メンテナンスに加えて宇宙ゴミ(スペースデブリ)除去といった「軌道上サービス」や民間の宇宙ステーションの建設作業に関する需要が急増しているという。
こうした需要を受け、同社では宇宙で汎用的な作業を遂行できる宇宙用自律ロボットアームを開発、提供している。
先行して開発が進む2m級の「GITAI S2」は、2022年2月に宇宙航空研究開発機構(JAXA)が行った8m級熱真空チャンバー内での技術実証に成功。地上でのシステムとしての技術成立性を確認できる「TRL 6」を達成した。2023年には、宇宙空間でのシステムとしての技術成立性を確認できる「TRL 7」の達成に向けて国際宇宙ステーション(ISS)船外での実証実験を予定しているという。
今回発表した10m級のGITAI S10は、顧客のさまざまな作業ニーズに短期間で応えられる柔軟性が特徴と説明。これは、宇宙用ロボットアーム開発に必要なハードウェアやエレクトロニクス、ソフトウェアなどの要素技術をすべて自社で所有し、製品を一気通貫で開発できる開発手法によるものだとしている。
開発開始から半年以内でTRL 3の実証試験にすべて成功。2023年3月にはTRL 6の達成を目標として、擬似的な無重力環境である水中実験施設で以下のような技術実証試験の実施を予定しているという。
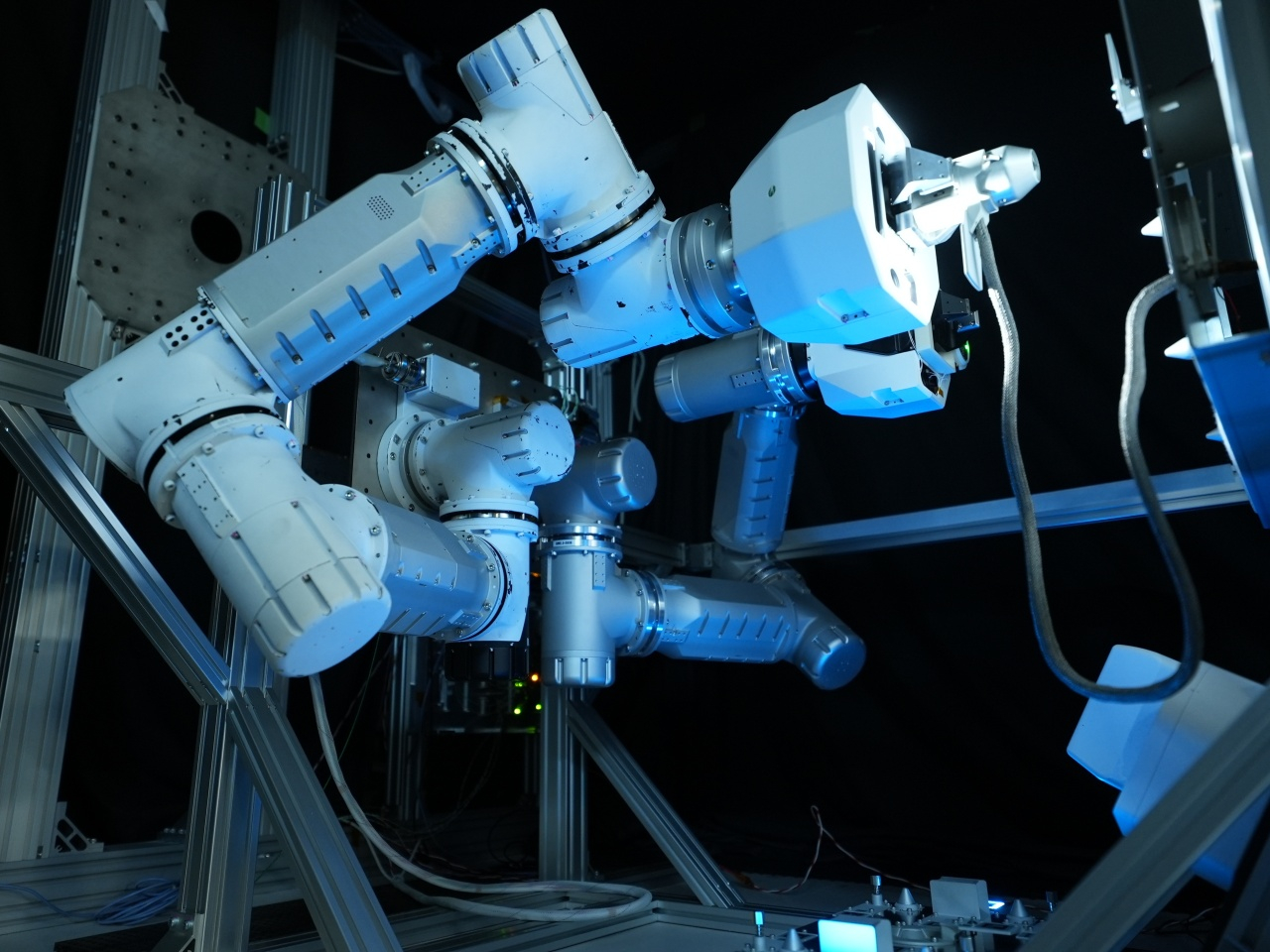
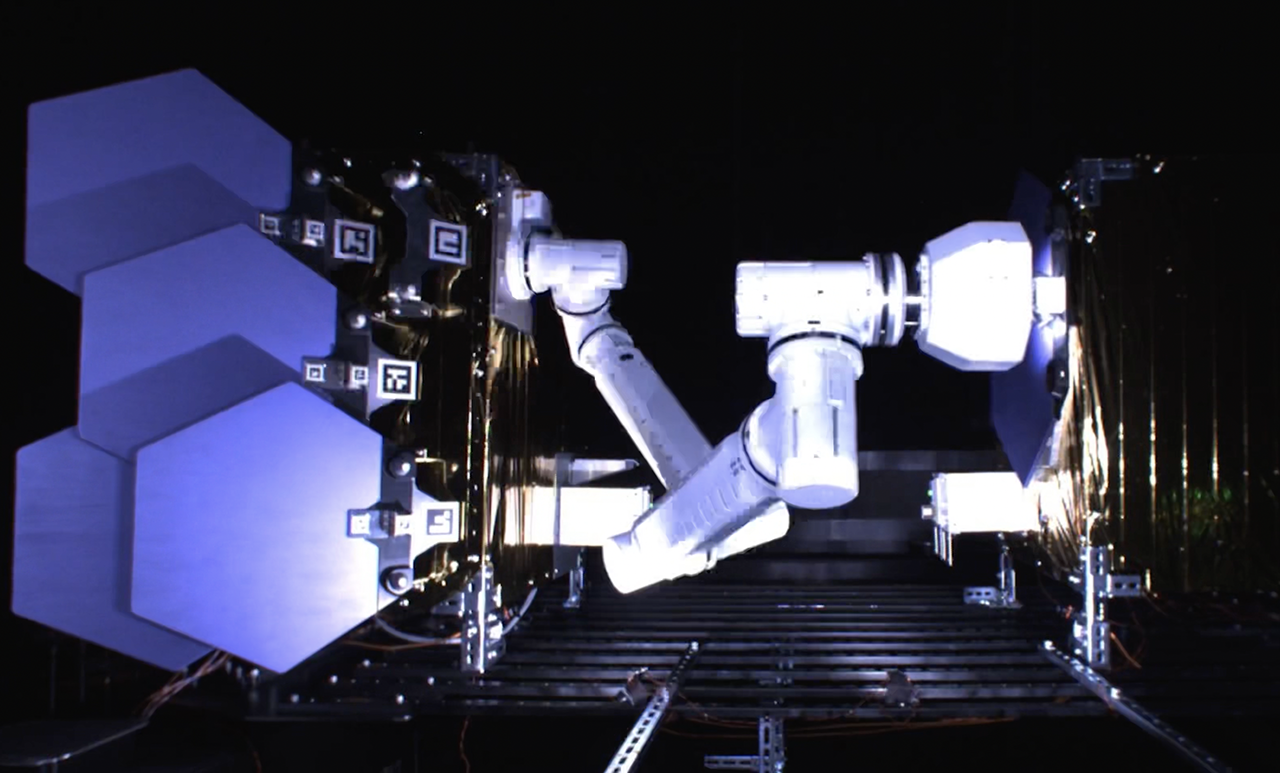
- 宇宙ステーションの船外を自ら移動し、建設や点検、修理などを想定した「グラップルエンドエフェクタ」と「グラップルフィクスチャ」を使ったロボットアームの自律的な移動能力のテスト
- 貨物補給宇宙機とのドッキングや積み荷の取り出しを想定した、「グラップルエンドエフェクタ」と「グラップルフィクスチャ」を使った移動体の捕獲・接続テスト
グラップルエンドエフェクタとグラップルフィクスチャは、ロボットアームの手先を交換可能にするためのGITAI独自開発のインターフェース。さまざまなツールと接続して用途が異なる、複数の作業が可能なタスク性能の向上だけでなく、アームの両端に装備することでアームそのものの自律移動も可能になると説明している。
Related Articles

最新記事
Show more
フォトレポート


![[フォトレポート]地球からは見えない謎に満ちた「月の裏側」--中国「嫦娥6号」が撮影](https://uchubiz.com/wp-content/uploads/20240604_change6_1280x960.jpg)
カテゴリー
タグ検索
- #火星
- #Perseverance
- #JPL
- #KDDI
- #Starlink
- #NASA
- #ispace
- #HAKUTO-R
- #Rocket Lab
- #SAR
- #Synspective
- #コンステレーション
- #衛星データ
- #中国
- #アストロスケール
- #スペースデブリ
- #JAXA
- #ISS
- #Artemis
- #ESA
- #SpaceX
- #CLPS
- #QPS研究所
- #キューブサット
- #きぼう
- #ElevationSpace
- #LEO
- #Axiom Space
- #Starship
- #Artemis II
- #宇宙飛行士
- #Artemis III
- #Blue Origin
- #H3
- #SLIM
- #HOSPO
- #宇宙なんちゃら こてつくん
- #サンプルリターン
- #インターステラテクノロジズ
- #J-SPARC
- #天地人
- #ISRO
- #Space BD
- #Orion
- #Artemis I
- #SLS