



ニュース
衛星の軌道決定の精度をセンチメートル単位に–「オンボードPPP」技術、軌道上で実証実験へ
2025.07.17 10:30



宇宙航空研究開発機構(JAXA)は軌道上でリアルタイムに得られる軌道決定精度よりも1桁以上精度がいい、センチメートル級の軌道決定精度を実現する「オンボードPPP」技術の軌道上実証実験を実施する準備が整った。第一宇宙技術部門が7月15日に発表した。
オンボードPPPが必要な理由
日常的に活用されている衛星測位は、衛星を利用して地上での位置を計測するものであり、カーナビやスマホの現在地を計算する機能は、衛星測位システム(Global Navigation Satellite System:GNSS)と呼ばれる技術で実現されている。日本の準天頂衛星システム(Quasi-Zenith Satellite System:QZSS)「みちびき」も衛星測位システムの一つ。
この衛星測位システムは、地上だけでなく、宇宙の衛星利用でも利用されている。例えば、地球観測衛星の位置や軌道を正確に知ることは、衛星が撮像した画像を処理するために非常に重要になっている。
複数のGNSS衛星から送信される「位置」「時刻」の情報を持つ測位信号を1台の受信機で受信して、観測点の位置を決定する測位方法は「単独測位」といわれる。
単独測位は、GNSS衛星の軌道と時刻の誤差、測位信号が受信機に届くまでに通過する大気や電離層の影響などを受け、数メートル~数十センチメートルの誤差が生じることがあると言われている。
誤差要因となる大気や電離層の影響を補正する情報を使用して2周波測位することで衛星の精密な軌道時刻を決定できるようになり、センチメートル級の精度で単独測位できるのが「高精度単独測位(Precise Point Positioning:PPP)」と呼ばれる方法だ。
衛星の精密な軌道時刻を決定するには、複数のGNSS衛星が発信する測位信号が必要になる。その処理は地上で行われており、信号の送受信から処理まで現状では数時間から数日かかるのが実情としている。
QZSSからは衛星の軌道時刻を補正するための「補正信号」がリアルタイムで配信されている。衛星の専用の受信機を搭載し、軌道上で高度に処理できれば、QZSSからの補強信号が常に受信できる環境でリアルタイムに高精度測位が可能になる。
軌道を周回する衛星でPPPを実現するために重要なのが、受信機と計算機になる。
QZSSからはPPPに必要な補正信号はすでに送信されている。この補正信号を受信して活用するには、専用の受信機を衛星に搭載する必要がある。だが、受信機は大きく重い特注品であることから宇宙で使用するには多くの課題があったという。
専用の受信機を搭載しただけでは、高精度の測位は実現できず、軌道上(オンボード)でアルゴリズムのチューニングを複数回実施することでオンボードPPPに最適なパラメーターを導出できる高性能な計算機も必須となっていた。
「ワダツミ-I」に高性能コンピューターを搭載
こうした背景から第一宇宙技術部門が小型衛星専用受信機を、研究開発部門が計算機をそれぞれ開発。開発された小型衛星専用受信機と計算機を組み合わせることでオンボードPPP技術の軌道上実証が可能となったと説明している。
開発された機器は、QPS研究所(福岡市中央区)が開発、運用する小型の合成開口レーダー(SAR)衛星「QPS-SAR」10号機「ワダツミ-I」に搭載された。ワダツミ-Iは5月17日に打ち上げられ、予定の軌道に無事投入された。
地上局に届いたGNSS衛星の信号から衛星の軌道情報(軌道暦)と衛星時計の誤差情報(クロック補正)をリアルタイムに近い形で生成、配信するソフトウェア「MADOCA」(Multi-GNSS Advanced Demonstration tool for Orbit and Clock Analysis)は第一宇宙技術部門が開発。このMADOCAをみちびきに応用したのが、高精度測位補強サービス「MADOCA-PPP」。内閣府が2024年4月から提供しているMADOCA-PPPはみちびきの信号が受信できるアジアオセアニア地域で利用できる。
このMADOCA-PPPの機能を、GNSS信号の解析ソフトウェアライブラリ群「RTKLIB」に追加したプログラムパッケージ「MALIB」の研究開発も第一宇宙技術部門が進めてきた(RTKLIBとMALIBはオープンソースソフトウェア=OSS)。このMALIBを地球低軌道(LEO)用にした「MALIB-LEO」がワダツミ-Iに搭載されている。
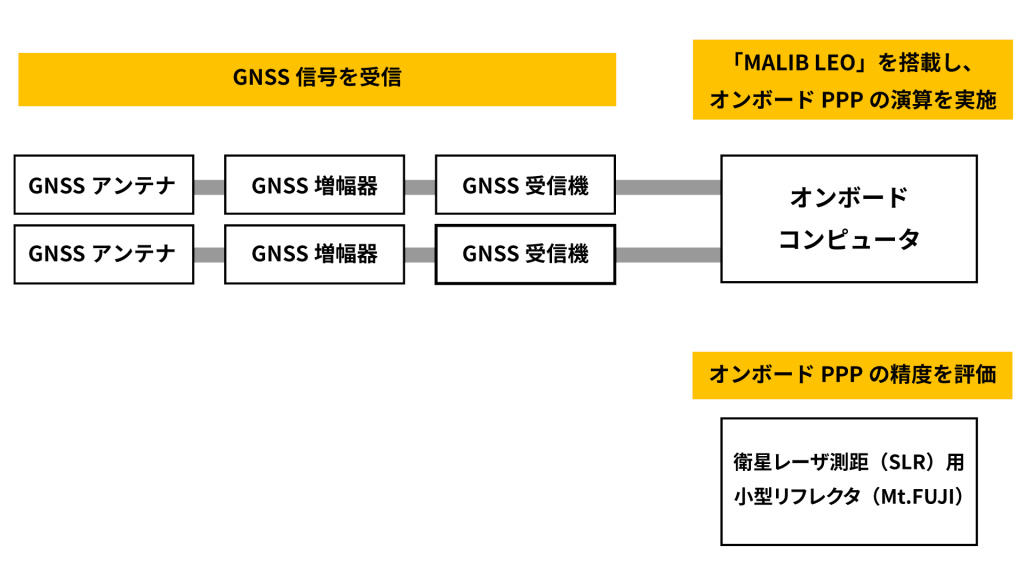
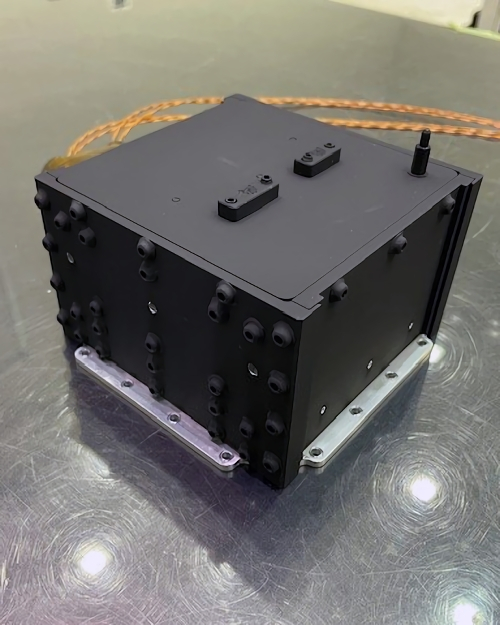
MALIB-LEOは、研究開発部門が2021年から研究開発してきている高性能計算機「H2-OBC」(Heterogeneous High-end On-Board Computer)で稼働する。H2-OBCは、10cm×10cm×10cmという小型でも高度なAI(人工知能)処理が可能であり、将来の純国産化を念頭に100%民生品で組み立てられるように開発されたという。
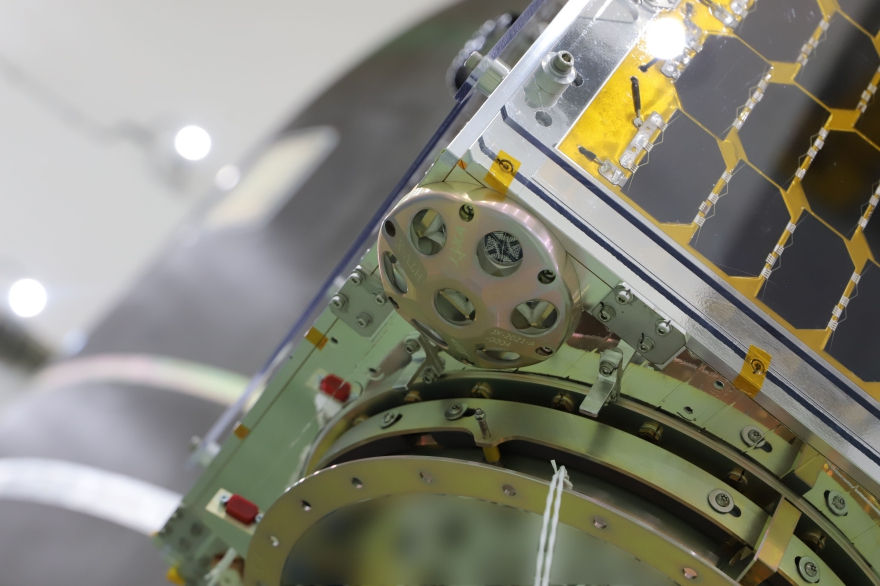
オンボードPPPの精度はどのように評価するのか。これには、JAXAの追跡ネットワーク技術センターが開発した、「衛星レーザー測距(Satellite Laser Ranging:SLR)」の小型の反射器(リフレクター)である「Mt.FUJI」を活用する。
SLRは、地上のSLR局からレーザーを照射して反射光を検知するまでの往復時間を計って、宇宙機とSLR局間の距離をミリメートル単位で測ることが目的。
Mt.FUJIは、キヤノン電子が開発した超小型衛星「CE-SAT-IE」に搭載され、基幹ロケット「H3」試験機2号機で2024年2月に打ち上げられた。
2024年8月にJAXAの筑波宇宙センターに整備したSLR局からMt.FUJIにレーザーを照射して、Mt.FUJIからの反射光(リターン)の取得に成功。JAXAは、軌道上でSLR反射器として所定の性能が発揮されていることを確認したという。CE-SAT-IEまでの距離は約1100kmと説明する。
オンボードPPP実証機を構成するGNSS受信機やH2-OBCが正常に動作することを確認。GNSS受信機で取得した軌道上データを使用してH2-OBC上で動作するMALIB-LEOが測位演算結果を正常に出力することが確認されている。
関連情報
第一宇宙技術部門 発表
オンボードPPP(第一宇宙技術部門)
オンボードPPP(研究開発部門)
オンボードAI(研究開発部門)
Mt.FUJI(追跡ネットワーク技術センター)
MADOCA-PPP(内閣府)
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #ElevationSpace
- #ESA
- #NASA
- #SpaceX
- #Falcon 9
- #QPS研究所
- #GNSS
- #ISS
- #中国
- #天宮
- #Starship
- #宇宙港
- #Crew Dragon
- #Axiom Space
- #サブオービタル
- #スペースプレーン
- #Boeing
- #HOSPO
- #Firefly Aerospace
- #Starliner
- #将来宇宙輸送システム
- #SAR
- #Synspective
- #宇宙飛行士
- #インターステラテクノロジズ
- #きぼう
- #火星
- #Starlink
- #Perseverance
- #SLS
- #Orion
- #スペースデータ
- #Space BD
- #JAXA
- #衛星データ
- #Artemis III
- #ZERO
- #スペースデブリ
- #AST SpaceMobile
- #Blue Origin
- #Rocket Lab
- #KDDI
- #HAPS
- #SPACE COTAN
- #天地人
- #スカパーJSAT
- #ispace
- #HAKUTO-R
- #SLIM
- #Super Heavy
- #Sierra Space
- #キューブサット
- #CCP
- #J-SPARC
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #LEO
- #Artemis
- #H3
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん