



ニュース
ispace着陸失敗から考える「月輸送ビジネス」の難しさと挑戦する意義
2025.06.25 11:45



既報の通り、民間月探査計画「HAKUTO-R」を進めるispace(東京都中央区)は、ミッション2「SMBC×HAKUTO-R VENTURE MOON」で着陸船(ランダー)「RESILIENCE」が着陸に失敗した要因は、搭載されるレーザー距離計(Laser Range Finder:LRF)のハードウェア異常と特定した。
月で何が起きていたのか
RESILIENCEの着陸シーケンスを区切ると(1)「軌道離脱」(2)「惰性降下」(3)「減速噴射」(4)「減速噴射&姿勢変更」(5)「最終降下」(6)「最終着陸」――という6つの流れになっている。
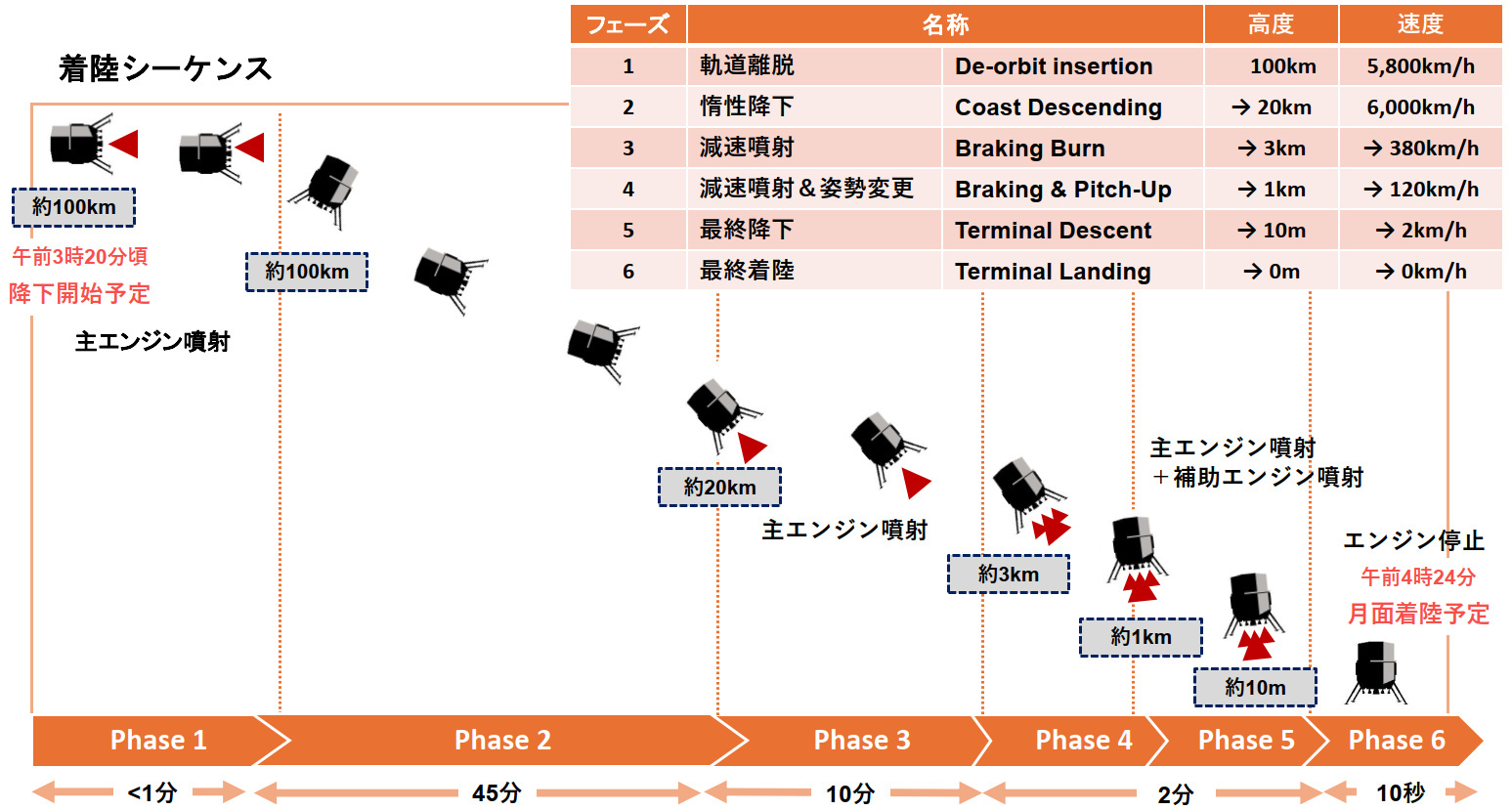
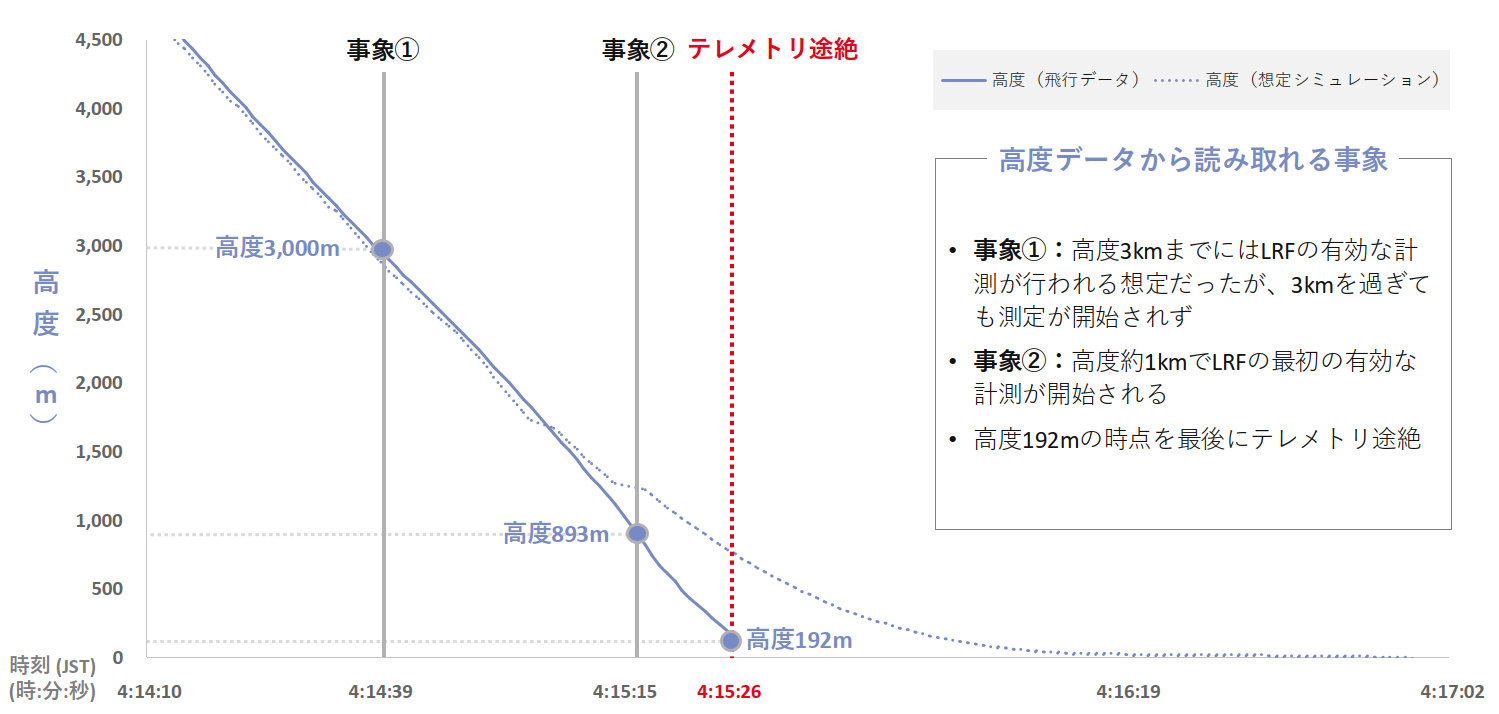
月面でのRESILIENCEは、(1)の軌道離脱から(3)の減速噴射までは想定通りに稼働していた。問題が発生したのは、(4)の減速噴射&姿勢変更と(5)の最終降下の段階と見ることができる。計画では、減速噴射を済ませた時点(高度3km、時速380km)でLRFの測距が開始する予定だった。しかし、実際にLRFの測距が始まったのは高度893m。
LRFの測定が開始され、RESILIENCEは主エンジンと補助エンジンを噴射して急減速を開始した。高度650m時点での速度は毎秒66m(時速237.6km)だが、同高度での想定していた速度は毎秒44m(時速158.4km)。つまり、高度650m時点の実際の速度は想定の1.5倍となっていた。
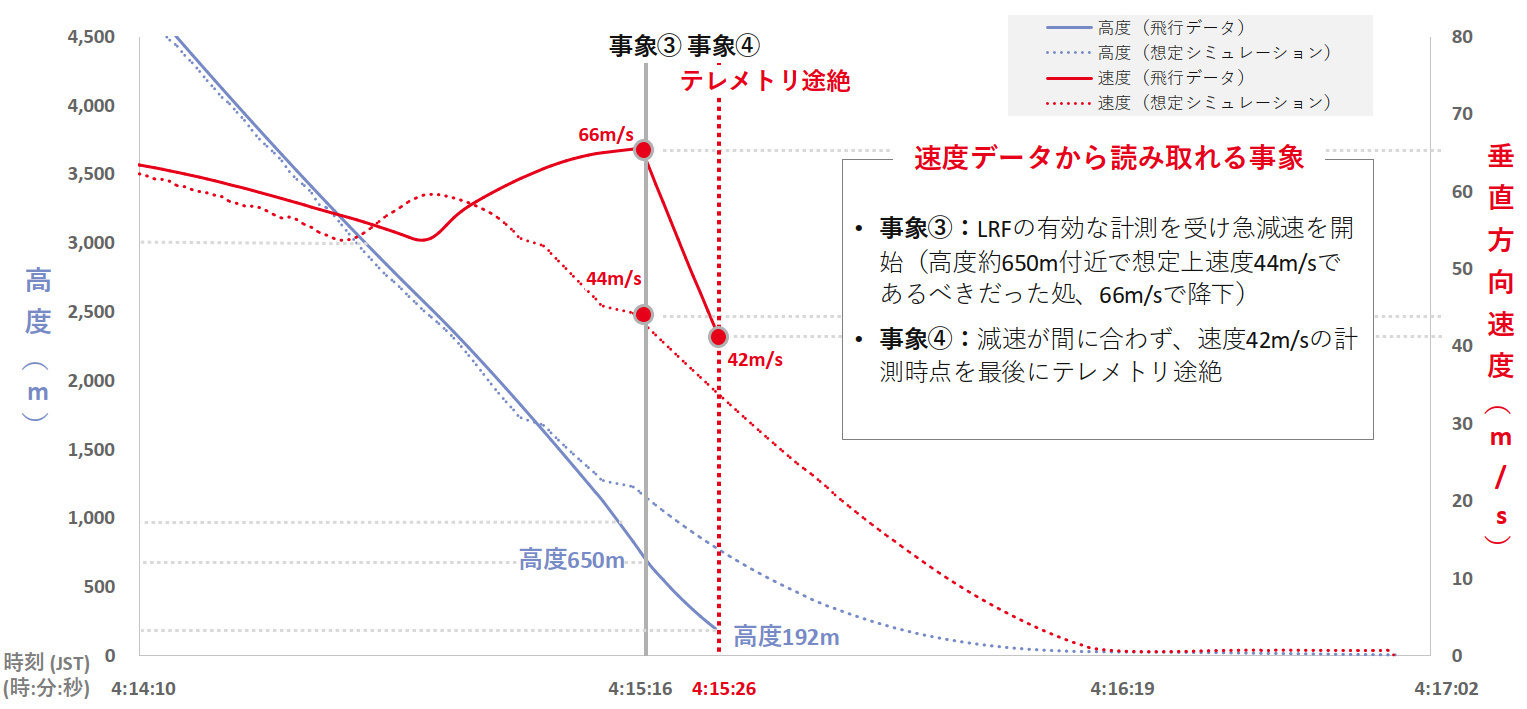
10秒後、速度は毎秒42m(時速151.2km)で高度192mというテレメトリーを最後に通信は途絶えた。想定より速い速度からの減速となったことで、減速が間に合わずにRESILIENCEは月面にハードランディングしたと同社は考えている。衝突したのは、目標地点から南に約282m、東に約236mの地点。
ispaceは、検証作業からLRFのハードウェア異常が原因と特定。LRFのハードウェア異常が起きた背景として4つの可能性を絞り込んだ。具体的には以下の通り。
- 事前に把握していた着陸地点のアルベド(反射率、LRFはレーザー光をあてて反射する光で距離を測る)の特性は想定内だったが、実際のレゴリスに想定外の特性があった可能性を否定できない
- ミッション1に比べ、レーザーの入射角が比較的浅かったことがアルベドの低減に影響した可能性を否定できない。ミッション1のLRFよりもレーザー出力が比較的弱かったことがアルベドの低減につながった可能性を否定できない
- 事前の野外試験の結果を踏まえると、速い速度での性能が想定よりも悪かった可能性を否定できない
- 熱真空試験や熱サイクル試験では性能劣化は認められていない。放射線試験では、極端に強いレベルのケースで性能劣化を確認しており、月着陸で想定している被曝量から想定しにくいが、可能性として完全に排除できない
LRFはどのように組み込まれたのか
既報の通り、ミッション1とミッション2でLRFのメーカーは異なっている(ミッション1のLRFのメーカーが製造を停止したため)。そのため、ispaceは、ミッション2では、メーカーからの情報を参考するとともに複数の試験を実施した上で高速度でのLRF性能について高度約3kmまでは測距可能と判断している。
LRFの静的性能について、メーカーは仕様値として最大14kmまでの測距が可能と説明、ispaceは野外試験(高尾山と東京湾)で最大7.5kmまでの測距が可能なことを確認している。
LRFの動的状態での性能についてメーカーは、毎秒88.8m(時速約320km)で1.5kmまでの測距性能が速度で変化しないと説明。メーカーはまた、最悪の想定として静的性能から30%劣化することもあり得るとしている。
そこでispaceは、30%というメーカーの回答からさらに慎重になって「60%劣化」を想定。静的性能の7.5kmの60%劣化ということで高度3kmからLRFは測距できるものとして全体を設計している。
前回のミッション1と今回のミッション2は、高度測定という点で着陸に失敗したと言える。だが、ミッション1では、ランダーで活用する降着制御系アルゴリズムというソフトウェアに原因がある。対してミッション2ではLRFというハードウェアに原因がある。このことからミッション2では「ミッション1の問題は再発していない」(ミッション2開発統括 日達佳嗣氏)と説明している。
ミッション1では、ランダーは急な崖の上を飛行したことで急激な高度の変化をセンサーを捉えた。急激な高度変化というデータをispaceが開発したソフトウェアはセンサーが間違っていると判断(実際には正しく測定していたことが分かった)。そのため、ランダーは高度5kmにいるのに、月面にいるはずと判断してホバリングを継続しているうちに推進薬が枯渇して高度5kmから落下して月面に墜落した。
ミッション2では、LRFの有効データ取得のタイミングが遅れたことが原因となり、減速が間に合わなかった。背景にあるのはLRFの性能。動的環境でのLRFの性能把握が不十分、飛行中にLRFの性能が劣化するということもあり得る。また、レゴリスのアルベド特性など不確定な要素も残っている。
過去の実績がなくても活用するという判断
LRFについてispace取締役で最高技術責任者(CTO)の氏家亮氏は「冗長性のためにLRFは複数搭載していたが、どちらも同じデータを示していた」ことを明らかにしている。氏家氏は、RESILIENCEに搭載されたLRFについて、宇宙空間で実際に飛行した実績(Flight Proven、フライトプルーブン)がないものであることを明かした。
「推進系システムや通信機などクリティカルなものは実績があるところを選ぶ」(氏家氏)。推進系システムや通信機などは、地球を周回する観測衛星に活用されることがあって選択肢が多い。しかし、月着陸に使われる部品は、製品の「マーケットそのものが小さい」(氏家氏)ため、過去の実績がないものは「自分たちでテストするしかない」(氏家氏)と決断して、テストして性能や機能に問題がないことを確認してからランダーに組み込んだ。

ランダーを構成するセンサーや部品などの「コストとクオリティ、そのバランスについては社内で度々議論している」とispace取締役で最高財務責任者(CFO)の野崎順平氏は明らかにしている。
月着陸を成功させるために「クオリティ重視となれば、例えばコストは10倍にもなり得る」(野崎氏)。宇宙機関であれば、(無尽蔵とは言えないまでも)コストをかけることはできる。しかし、ispaceのような民間企業ではやみくもにコストをかけることはできない。
かといって、「安ければいいというものでもない」(野崎氏)。コストを下げるために自社で開発するとなれば、ランダーの開発期間が長期化してしまう。
民間企業として貨物(ペイロード)を月に運ぶというサービスを、より安価により早くユーザーに提供するというビジネスモデルを構築していくことを考えると、そして他社よりも早くビジネスを展開したいとなると、外部から調達するのは当然の判断だ。仮に過去の実績がないものであっても、「自分たちでテストするしかない」(野崎氏)という決断はやむを得なかったものと言える。

ビジネスの難しさを痛感
民間企業による月着陸への挑戦は2019年から始まっている。ispaceも含めて回数は7回。そのうち4回は、米航空宇宙局(NASA)が月への貨物(ペイロード)輸送を民間企業に有償で委託する「商業月面輸送サービス(CLPS)」によるものだ。ispaceの2回の挑戦は、どちらも同社が上場を含めて自ら資金を調達している(2回の挑戦は「月輸送」という新しいビジネスモデルを構築するための研究開発と同社は位置付けている)。
必要な部品をすべて自社で開発することはないが、コストとクオリティのバランスを考えながら外部の製品を調達して(過去の実績がないとしても)、ランダーを設計、製造して月までペイロードを運ぶ――。同社の代表取締役で最高経営責任者(CEO)である袴田武史氏は改めて、同社が完成させようとしている「ビジネスとしての難しさを感じている」と説明した。

外部の知見を取り入れる
今回の反省を踏まえて、同社は宇宙航空研究開発機構(JAXA)やNASAなどの宇宙機関での現職や経験者を含む、第三者の専門家を含む「改善タスクフォース」を立ち上げる。改善タスクフォースは、後続ミッションに向けた開発上の対策を検討する
ispaceは第三者からの助言などを適宜仰いできているが、改善タスクフォースとは別に、今後はJAXAを中心に、より一層の技術支援を拡張させることも明らかにしている。ispaceとJAXAは、2027年に打ち上げる計画となっているミッション4のランダー開発で技術協力を進めており、JAXAの「SLIM」での実績を生かした技術支援や情報提供などを通じて次以降の着陸成功の確度を向上させる考えだ。
加えて、「LRFを含む着陸センサーの検証戦略・計画の見直し」「LRFを含む着陸センサーの選定・構成・運用の見直し」という2つの改善策を打ち出している。
JAXAなどの外部からの支援を含めて、現在のLRFの実例や野外試験計画を見直す。高速度で低アルベドという条件下で検証方法を先行事例と比較して、具体的に改善策を打ち出す。LRFを含む着陸センサーの(宇宙での利用実績を含めて)選定基準についても外部からの知見も積極的に取り入れる考えだ。
ミッション3やミッション4以降は、画像航法カメラやLiDARも使用する計画だが、より着実に着陸を実現できるセンサーの構成と運用方法を再検討することも打ち出している。
既報通り、LRFなどの着陸センサーの再選定や試験計画の見直しなどでミッション3とミッション4で合算で最大15億円程度の開発費用増加を見込んでいる。また、着陸センサーの再選定と調達のリードタイム、試験計画の見直しなどがあり開発計画を見直したが、ミッション3とミッション4の現行スケジュールへの影響はないと判断している。
4つの成果
「着陸に失敗」したという現実を同社は直視している。ただ、そのことだけがミッション2の結果ではない。氏家氏は4つの成果を示した。
- 2回の月周回軌道までの確かな輸送能力を実証
- 2つのミッションで異なる条件下での着陸シーケンスデータを獲得
- 目標着陸地点との差は1km圏内。誘導制御機能を実証
- ミッション1と比べて開発・運用面で飛躍的効率化
ミッション2では、ミッション1と続いてサクセス8「月周回軌道上でのすべての軌道制御マヌーバの完了」まで成功させている。ミッション1の経験を生かして、今回のミッション2では、ソフトウェアは設計通りに機能、着陸姿勢を維持した状態で降下できたことを確認している。
ミッション2では、ランダー開発の期間が約40%短縮、費用が約50%削減することに成功している。
ミッション2のランダーは、ミッション1と同じモデルであることから、「Non-Recurring Engineering Task」(一度限りの設計・開発工程)を抑制することに成功している。これは開発にかかる期間や費用の両面で効いている。
ミッション1の経験から、製造や組み立て、試験の手順が改善され、開発の不具合が減少し、調達品の納期管理も改善できたことで開発期間が短縮。以前の経験から、プロジェクトマネジメントも効率化できるようになったことでエンジニアの稼働時間を削減できるようになっている(つまりは人件費を抑制)。
打ち上げ後から初期運用フェーズ完了までの期間も約60%削減できているとしている。
Related Articles


最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #サブオービタル
- #Rocket Lab
- #きぼう
- #ISS
- #キューブサット
- #ZERO
- #インターステラテクノロジズ
- #中国
- #SpaceX
- #Falcon 9
- #NASA
- #Starship
- #火星
- #衛星データ
- #天地人
- #Firefly Aerospace
- #CLPS
- #Artemis II
- #Orion
- #宇宙飛行士
- #QPS研究所
- #SAR
- #New Shepard
- #Blue Origin
- #Crew Dragon
- #スカパーJSAT
- #ispace
- #Boeing
- #スペースプレーン
- #HAPS
- #Starlink
- #ElevationSpace
- #LEO
- #Artemis
- #KDDI
- #SLS
- #ESA
- #GNSS
- #天宮
- #宇宙港
- #Axiom Space
- #HOSPO
- #Starliner
- #将来宇宙輸送システム
- #Synspective
- #Perseverance
- #スペースデータ
- #Space BD
- #JAXA
- #Artemis III
- #スペースデブリ
- #AST SpaceMobile
- #SPACE COTAN
- #SLIM
- #HAKUTO-R
- #Super Heavy
- #Sierra Space
- #CCP
- #J-SPARC
- #Intuitive Machines
- #アストロスケール
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #H3
- #Artemis I
- #宇宙なんちゃら こてつくん