




特集
SLIMの高精度月着陸を実現させた「画像照合航法」とは–GPSなしで「目標地点から3m」まで迫れたワケ(秋山文野)
2024.02.06 13:30



2024年1月20日、宇宙航空研究開発機構(JAXA)の小型月着陸実証機「SLIM」は月の南緯13度地域にある「神酒の海」の「SHIOLI」クレーターへの着陸を実施し、精度100m以内という「ピンポイント着陸」の実証に成功した。
およそ20分の着陸降下運用の中、SLIMは着陸目標地点まで3~4mにまで迫ったものの、高度50m付近で2基のメインエンジンのうち1基が破損して脱落というトラブルに見舞われた。
エンジン1基で着陸を続け、目標から東方向に55mという精度で着陸を実現した。高度5m付近での小型ローバー「LEV-1」と「LEV-2(SORA-Q)」の放出にも成功した。
SLIMは本来、5つの着陸脚を使って倒れ込むように接地し、太陽電池パネルを上に向けて発電する計画だった。そしてマルチバンド分光カメラで月面のカンラン石を観測する予定だった。
しかし、接地姿勢で太陽電池パネルが西側を向いてしまったため着陸当初は電力を得ることができず、バッテリーが機能した数時間後に一旦活動を休止。その後、1月29日に月面で午後になり太陽光が西側から差したことから発電可能になり、マルチバンド分光カメラでの観測を十分に実施できた。想定外の姿勢での着地から劇的な活動再開、そして日没とともに「休眠」という結果となった。
最終的な着陸(接地)地点は着陸目標点からズレたものの、100m以内という精度目標は無事にクリア。これを実現した技術のカギ、画像照合航法とはどんなものだろうか。
GPSのない月で高精度着陸をどう実現?
SLIMの着陸シーケンスは、月面から近い位置で高度15km、遠い位置で高度600kmという月周回軌道から高度を下げ、航法カメラで撮影した画像をSLIM自身に搭載されたオンボードコンピュータ内の月面マップと照合し、位置を推定しながら着陸目標地点に接近するという「画像照合航法」をベースにした手順となっている。
画像照合航法とは、地形相対航法(Terrain Relative Navigation:TRN)とも呼ぶ。探査機のカメラなどのセンサーが取得した天体表面の地形データと、あらかじめ探査機に搭載されているマップとを照らし合わせて位置を推定する航法だ。
アポロ計画の頃から使われ、日本では小惑星探査機「はやぶさ」「はやぶさ2」、NASAの「Mars 2020」ローバー(パーサヴィアランス)や小惑星探査機「OSIRIS-REx」なども利用している。GPSが利用できない惑星探査や、地球では海底探査などにも利用される技術だ。
TRNを実現するには、「目標天体の地形マップ」「探査機側でデータを取得して作るマップ」、そして「2つのマップを照合して位置のズレを修正する機能」が必要だ。
このうち目標天体の地形マップは、月・火星はこれまでに周回探査機が表面の地形を探査しているので、月ならば米国のLunar Reconnaissance Orbiter(LRO)、日本のかぐや(SELENE)、インドのチャンドラヤーン2号、火星ならばMars Reconnaissance Orbiterなどが観測して作成したマップを利用できる。
重力天体の月での着陸は「一発勝負」に
小惑星など表面の様子が未知の天体の場合は、探査機自身がまず着陸の前に観測してDEM(デジタル標高モデル)というマップを作る必要がある。
「はやぶさ2」が2018年6月に小惑星リュウグウに到着してから、2019年2月に初の着陸を試みるまで何度もリュウグウ表面への降下を繰り返していたのは、初めて表面の様子が判明した天体に着陸する準備としてDEMを作成するためだった。
月はこれまでに多くの探査機がマップを作っているという点では情報が豊富だ。SLIMの場合、チャンドラヤーン2号が撮影した高解像度の画像を利用できた。クレーターが豊富にある月面では、マップの「目印」としてクレーターを利用することができる。
一方で、月は地球の6分の1の重力を持つ「重力天体」だ。地球の8万分の1と非常に重力が小さいリュウグウなら何度も降下して上空まで戻ることができるが、月ではそうはいかない。着陸は一発勝負になり、数十分程度の短い時間の中でマップとカメラの画像を照合して画像照合航法をやり遂げなくてはならない。火星と異なり大気がないため、パラシュートで減速することもできない。SLIMは20分程度の着陸降下中、数回のタイミングで5秒以内に画像照合を実行しなくてはならないという制約があった。
これは、もともとイプシロンロケットで打ち上げられる計画だったSLIMが推進剤を除いて200kg程度と小型軽量だったため、計算機リソースや電力に限りがあるからだ。短い時間で画像照合を終えるため、精度を保ったまま高速化が必須になる。
そこでSLIMの場合、月面の3つのクレーターを組み合わせた「三角形データベース」というマップを持っている。これを具体的に説明すると、SLIMは着陸降下シーケンス中に航法カメラで撮影した画像からクレーターを抽出し、撮影画像のクレーターから三角形の組み合わせを作る。撮影した画像の三角形と三角形データベースをひとつずつ比較して、同じ三角形のペアを探す。三角形ペア同士でクレーターの特徴を比較し、一定以上の一致する部分が見つかれば、三角形の座標を用いてSLIM自身の自己位置の座標を求める、という「Triangle Similarity Matching (TSM)」という方法を取っている。
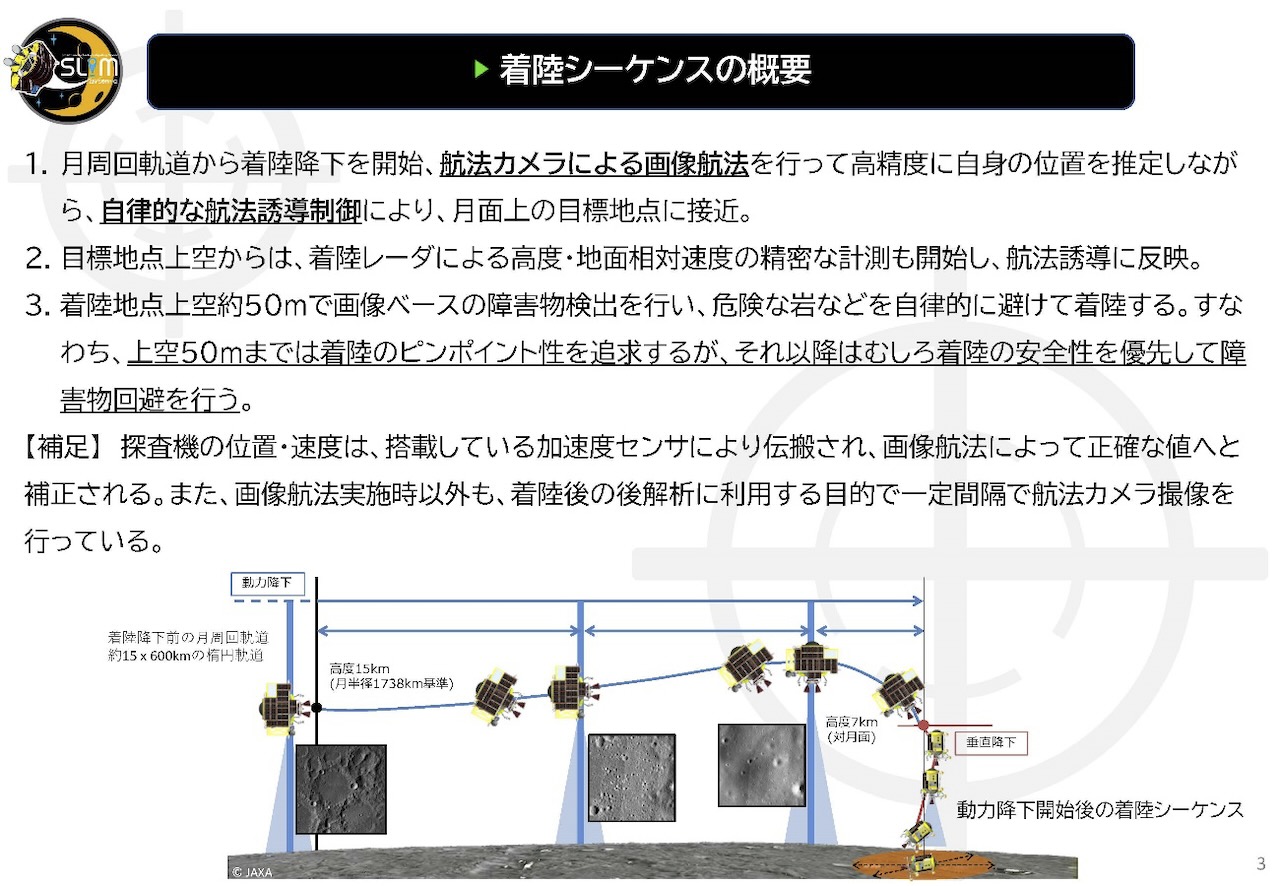
実際の着陸シーケンスでは、動力降下開始前に3カ所の上空でそれぞれ2回ずつ画像照合航法を実施。全て正常に完了し、SLIMからの信号で軌道修正も無事にできたことがわかった。続いてメインエンジンを噴射して動力降下フェーズを開始し、2カ所で画像照合を実施して、うち1カ所では高度約200m、水平位置約100m、2カ所目では高度約1km、水平位置約200mの位置の補正をおこなった。動力降下が終了すると、SLIMは予定通りの高度6.2km付近に位置しており、水平位置誤差は約100m以下となっていた。
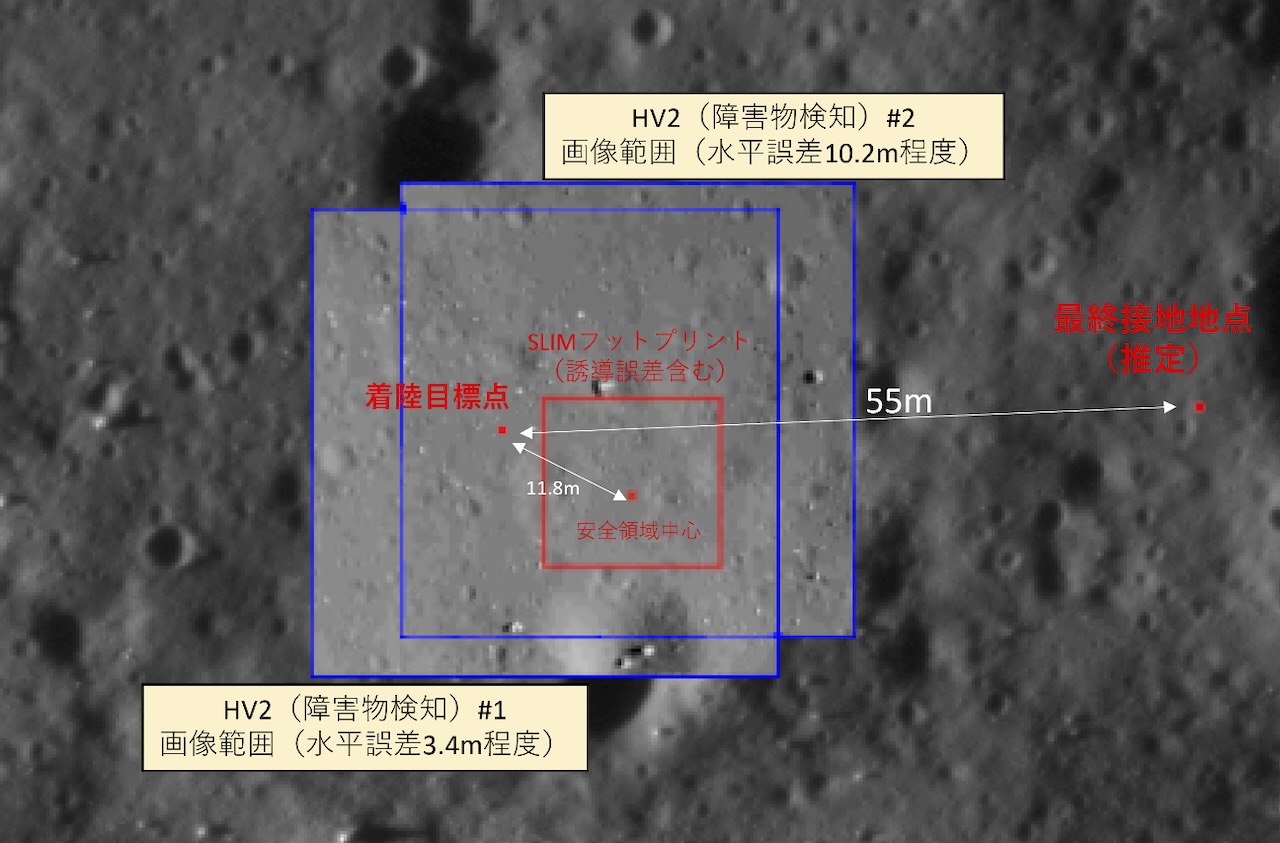
水平降下フェーズ中は高度4000mと高度500mで2回ずつ、計4回の画像照合を実施し、それぞれ100m、50m程度の水平位置を修正した。高度50mでは航法カメラの画像から障害物検出を行い、最も安全と見られる地点を探査機自身が特定して最終的な着陸目標を決め、降下を続けた。高度50m付近での障害物検知1回目では着陸目標から3~4m程度、2回目では目標から10m程度だった。距離が開いたのは、メインエンジンの片側が脱落して東側へ流されてしまったため。捉えていた着陸目標に行こうとしても行ききれなかった……というのが結果だ。
とはいえ、動力降下フェーズ前に6回、動力降下フェーズ中に4回、垂直降下フェーズ中に4回と合計14回の画像照合は全て正常に終了できている。月の場合は地球と距離が近く、通信という点では条件がよいので、計算機リソースに制限のない地上で、SLIM撮影の画像と月面マップを高精度でマッチングし、いざという場合のバックアップに使える。このバックアップの画像照合の結果とSLIM自身の画像照合の結果もよく一致していて、14回の結果は「全て正確であった」ということがわかった。
さらに航法カメラの画像から、障害物となる15cm以上の岩を検知する作業も行い、あらかじめ設定されていた着陸の目標地点から東南東に12mほど離れたところが、安全に着陸できる最終的な着陸目標となった。
SLIMはカメラ画像を使って月面マップを元に自分がどこにいるのか、そして危険な岩を避けてどこに行くべきだったのか、正確に把握できていた。エンジンの破損さえなければ、着陸目標地点からわずか3.4m離れた場所に着陸して、ほぼど真ん中に接地することができた可能性は高い。
「外的要因」と考えられているエンジン破損の理由はまだ不明だ。55mのずれはあっても100mのピンポイント着陸には余裕を残してやり遂げたことは間違いない。ただし、「降りたいところに降りる」は脚が機能してこそともいえる。1月25日のJAXA会見で宇宙科学研究所の國中均所長は、SLIMのメインエンジンである500N級スラスタでトラブルが発生したことを課題と捉えているとコメントした。2026年度に計画されている火星衛星探査機MMXでも同じクラスの推力のエンジンを搭載することから、エンジン破損の調査と対策の水平展開が待たれるところだ。
「ピンポイント着陸技術」実証の今後は
SLIMのピンポイント着陸の成果は、2025年度に予定されている日本・インド共同の月極域探査ミッション「LUPEX」にも活きてくる。
着陸機はインドが、日本はローバーという役割分担だが、着陸精度向上には日本から技術を提供する。LUPEXでは月の南極域で水を探査する目的で、「降りたいところ」が明確な計画だ。世界で初めて月の高緯度帯を攻めたインドと、クレーターの山肌に降りるという高精度な着陸をものにした日本のタッグは期待できる。
SLIMは2月1日、月面の日中の活動をいったん終了し、休眠状態に入った。休眠といってもSLIMの活動期間は着陸から「数日以内」で、月の夜を乗り越える「越夜」は本来の計画には入っていない。しかし「2月中旬以降、SLIMの太陽電池に日が当たる時期に再び運用に挑戦する予定」と越夜を試みることが明らかにされている。
地球時間で14日程度続く月面の夜はマイナス170度近くまで温度が下がり、バッテリーのリチウムイオンが凍結する、低温で電子機器の基板(特にはんだ付け部分)が変形して損傷するといったことが起きうる。インドのチャンドラヤーン3号も着陸成功の後に越夜を試みたものの、実現はしなかった。SLIMにとっても過酷なチャレンジだが、うまくいかなかったとしても日印双方が取り組んだ結果は今後活かすことができる。本格的な越夜の挑戦は、LUPEXの計画に含まれているのだ。
SLIMが成し遂げたピンポイント着陸の技術は、まずはLUPEXに活かされることになり、その後は国際協力も含めて展開されていくことになる。2020年代後半には「月探査促進ミッション(LEAD)」を計画しており、その一環として「月のGPS」にも取り組む計画だ。
地形相対航法はGPSのないところで利用する技術だが、LEAD計画の一環として月の通信・測位衛星(LNSS)の実証機(PDF)の2028年度の打ち上げを目指している。画像照合に加えて、衛星から位置情報を支援することで、より高度な月探査に向けて進んでいく。
Related Articles
最新記事
Show more
フォトレポート


![[フォトレポート]地球からは見えない謎に満ちた「月の裏側」--中国「嫦娥6号」が撮影](https://uchubiz.com/wp-content/uploads/20240604_change6_1280x960.jpg)
カテゴリー
タグ検索
- #火星
- #Perseverance
- #JPL
- #KDDI
- #Starlink
- #NASA
- #ispace
- #HAKUTO-R
- #Rocket Lab
- #SAR
- #Synspective
- #コンステレーション
- #衛星データ
- #中国
- #アストロスケール
- #スペースデブリ
- #JAXA
- #ISS
- #Artemis
- #ESA
- #SpaceX
- #CLPS
- #QPS研究所
- #キューブサット
- #きぼう
- #ElevationSpace
- #LEO
- #Axiom Space
- #Starship
- #Artemis II
- #宇宙飛行士
- #Artemis III
- #Blue Origin
- #H3
- #SLIM
- #HOSPO
- #宇宙なんちゃら こてつくん
- #サンプルリターン
- #インターステラテクノロジズ
- #J-SPARC
- #天地人
- #ISRO
- #Space BD
- #Orion
- #Artemis I
- #SLS