



特集
インドの月探査機「チャンドラヤーン3号」着陸成功のインパクト–日本にも朗報な理由とは
2023.08.24 18:07



8月23日、インドの月探査機「チャンドラヤーン3号」が月面の南極域に着陸を成功させた。4年前に同型の「チャンドラヤーン2号」での着陸失敗を乗り越えて、再チャレンジを成功させた。

インドの現地時間8月23日18時前から始まった着陸フェーズは、約1750kgの「Vikram(ヴィクラム)」着陸機を高度100kmの月周回軌道から計画に沿った降下軌道に投入した。予定着陸区域は月面の南緯69.367621度、東経32.348126度、4×2.4kmのエリアだ。着陸とみられるヴィクラムの高度情報が0を示してから数時間後、インド宇宙研究機関ISROは着陸地点の画像を公開。着陸機との通信が確立しているとして、着陸フェーズの各段階が成功したことが確認された。
チャンドラヤーン3号は、2019年に着陸に失敗した月探査機チャンドラヤーン2号の技術を受け継ぐ月周回・着陸探査機。2号は着陸フェーズ中に月面まで約700mのところでソフトウェア問題で失敗したとされており、ISROはチームを再始動して4年にわたって再挑戦を続けてきた。

推進モジュール、着陸機を合わせたチャンドラヤーン3号の全体重量は約3800kgで、着陸機は6輪のローバー「Pragyan(プラッギャン)」を搭載している。推進モジュールと着陸機が結合した状態で7月14日に地球を出発したチャンドラヤーン3号は、約半月かけて5回の地球周回を経て地球近傍を離脱、8月5日に月の軌道に入った。8月14日には、着陸に向けて月面から高度150~180kmを周回する軌道に入り、8月17日に推進モジュールと着陸機を分離した。

着陸機は月面の物質の密度や熱環境、月震を観測する3種類の観測装置を備え、ローバーはX線分光装置と分光顕微鏡を搭載している。着陸機とローバーはそれぞれ、月面で約14日間(月の1日)のミッションを予定している。世界で初めて約70度と月の極域に着陸を実現した探査機は、表面物質を調査し、極域に存在するとされる水氷(水が凍ったもの。他の物質の氷と区別するため「みずごおり」と呼ばれる)の発見を目指す。月面の水は2008年に打ち上げられたチャンドラヤーン1号の成果もあって存在が確実視されており、南極域では永久影と呼ばれるクレーターによって作られた1年を通して日陰になっている領域にあると考えられているが、まだ発見に至っていない。
インドはアジア初の火星軌道投入を成功させた2014年の火星探査機「マンガルヤーン」以来、深宇宙探査で着実な成功を続けてきた。月面着陸の試みは、1966年2月に旧ソ連の「ルナ9号」が世界で初めて成功させ、各国が50回以上実施している。しかし、1976年8月の「ルナ24号」以来長くブランクが続いており、21世紀に入って月面着陸を成功させたのは2013年12月の中国「嫦娥3号」だった。10年近く”21世紀組”の成功例は中国のみという状態が続き、イスラエル、日本、ロシアが失敗した月面着陸をついにインドが成功させ、中国一強の構図を変えたことになる。
4カ国目の月面着陸成功がもたらしたインパクト
チャンドラヤーン3号の月面着陸成功は、世界の月探査に少なくないインパクトを与えた。まずは、「重力天体への着陸技術」という惑星探査の重要技術をインドが獲得したという点がある。月面軟着陸は、探査の総合技術ともいえる難しさをもっている。月面はこれまで各国が周回探査機を飛行させて大まかな「地図」を作成してきているが、山や丘、クレーターといった大きな地形を把握することはできるものの、着陸地点に数十cmから数m単位の危険な岩や斜面が存在することをあらかじめ確認できるものではない。
そこで月着陸機は、おおむね着陸可能なエリアを選んで飛行計画を立て、さらに降下中にレーザー高度計など搭載センサーからの情報をもとに着陸候補地点を確認している。そうした処理を行う搭載コンピュータの性能や、超高速での軌道周回から数十分程度で月面タッチダウン時には速度0まで落とすエンジンの能力、降下中の推力の調整といった探査機のハードウェアの能力が一定レベル以上ですべて揃っている必要がある。また、計画上のコースを飛行すると探査機に起きる変化(姿勢の変更に伴う通信環境の変化や推進剤の消費による重量減など)、月面はどのように認識されるかといった点をシミュレートして飛行計画に織り込んでおく必要もある。中国はこうした能力を独力で開発し、嫦娥3号から5号まで連続成功させている宇宙大国だが、インドが一歩追いつく力を示したことになる。
日本と米国にとっては、インドの成功はプラス材料になりうる。チャンドラヤーン計画にはもともとNASAが協力しており、チャンドラヤーン3号の月着陸フェーズ中の重要な通信はNASAの持つ深宇宙通信施設DSNのキャンベラ局が担当した。着陸機にレーザーリフレクタを提供するなど協力を深めている。チャンドラヤーン3号の打ち上げに先立つ6月21日には、米国が主導する国際共同宇宙探査の枠組みであるアルテミス協定にインドは27番目の参加国となった。協定を結ぶことで、宇宙探査の成果の最大化を図ることができる。
一方で日本は、インドと共同で月極域探査ミッション(LUPEX)を2025年以降に実施する計画だ。日本は打ち上げロケット(H3)とローバーをインドは着陸機を提供することになっている。インドが着陸シーケンス全体の成功の経験を獲得したことで、LUPEXの成功率も高まる。両国が持っていない、月面での「移動」「越夜」「掘削」といった新たな技術獲得に集中できるようになる。
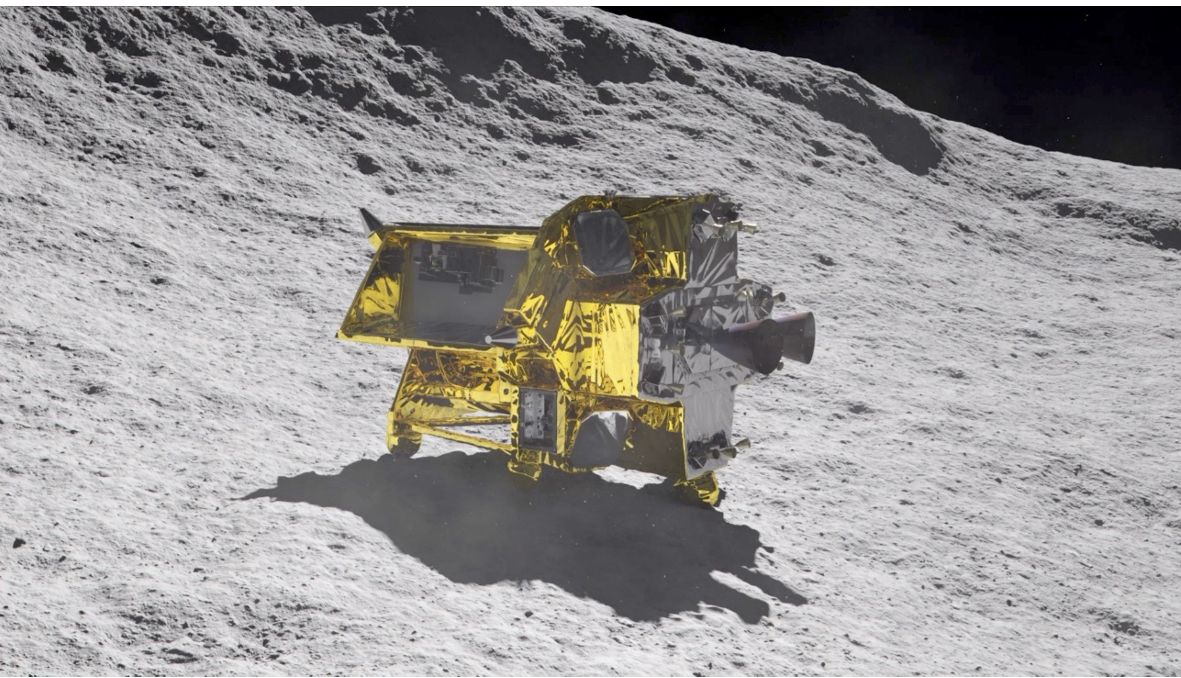
日本は8月27日(天候を理由に8月26日から1日延期された)に小型月着陸実証機「SLIM」を打ち上げる予定だ。SLIMの着陸実証は2023年末から2024年初頭に行われる予定で、2023年の後半を予定している米国のAstroboticによる民間月探査機Peregrine Landerが、民間として初めての着陸を達成する可能性はある。
しかし、SLIMは他と比べて着陸方式が大きく異なる。チャンドラヤーン3号などは着陸脚で探査機が垂直に立つ方式だが、SLIMは機体下部の主着陸脚で接地し、倒れ込むように4つの着陸脚でボディを支えるという他にない方式で、危険な傾斜地に強い。画像照合によって、サイエンス的に意義のあるターゲットに100m級の精度で着陸する技術の獲得も目指しており、成功順の競争を越えて、月探査で協力する2カ国がそれぞれ独自の着陸技術を持つことになる。
チャンドラヤーン3号の着陸が成功し、続く探査は月面での水氷の発見という科学的成果にも一歩近づくことになる。水は月面資源の鍵ともいえる物質で、アルテミス計画などで将来考えられている長期の有人探査の基盤となりうる。そのまま水として利用できるほか、電気分解すれば水素(燃料)と酸素にもなる。日本が開発する有人与圧ローバや水を推進剤とした深宇宙探査機の構想にとっても朗報だ。
ロシアの宇宙探査技術の相対的評価が大きく変化したことも挙げられる。ロシアは1976年にルナ24号で20世紀最後の月着陸を成功させた。しかし、2011年に火星の衛星の探査機フォボス・グルント打ち上げに失敗し、商業ロケットや実用衛星でも失敗、打ち上げ遅延が続いていた。ソ連時代の技術の継承がうまく進まず、危機的状況にあるのではないかとみられている。8月19日に発生したルナ25号の着陸失敗と続くチャンドラヤーン3号の成功で、その懸念は色濃くなったといえる。
チャンドラヤーン3号の着陸成功で、21世紀に入って中国がトップに立っている月探査に変化をもたらすものだ。NASAはアルテミス計画での有人探査に先立ち、極域で水を探査する無人ローバー「VIPER」を予定している。しかし、米国も1972年のアポロ17号以来、月面軟着陸の成功体験は途切れている。嫦娥計画を周到かつ着実に立て続けに成功させた中国の総合力は間違いない。そしてインドが続いたことで中国に対抗しうることも示された。
ただし、宇宙探査の協力はそれに値する実力あってのものだ。成功を掴んだインドとの協力関係を維持するには、米国のように過去の巨大な経験や設備を提供する、日本のように別軸の技術を実証するといったことも必要だ。日本は異なる着陸技術を獲得できるSLIM、LUPEXの打ち上げ手段となるH3ロケットを確実に成功させる必要があるだろう。
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #SpaceX
- #Falcon 9
- #Rocket Lab
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Crew Dragon
- #Axiom Space
- #ISS
- #HOSPO
- #SPACE COTAN
- #宇宙港
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #SLIM
- #HAKUTO-R
- #ispace
- #Starship
- #Super Heavy
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん