


ニュース
日産自動車、JAXAと共同研究中の月面ローバ試作機を公開
2021.12.02 14:01



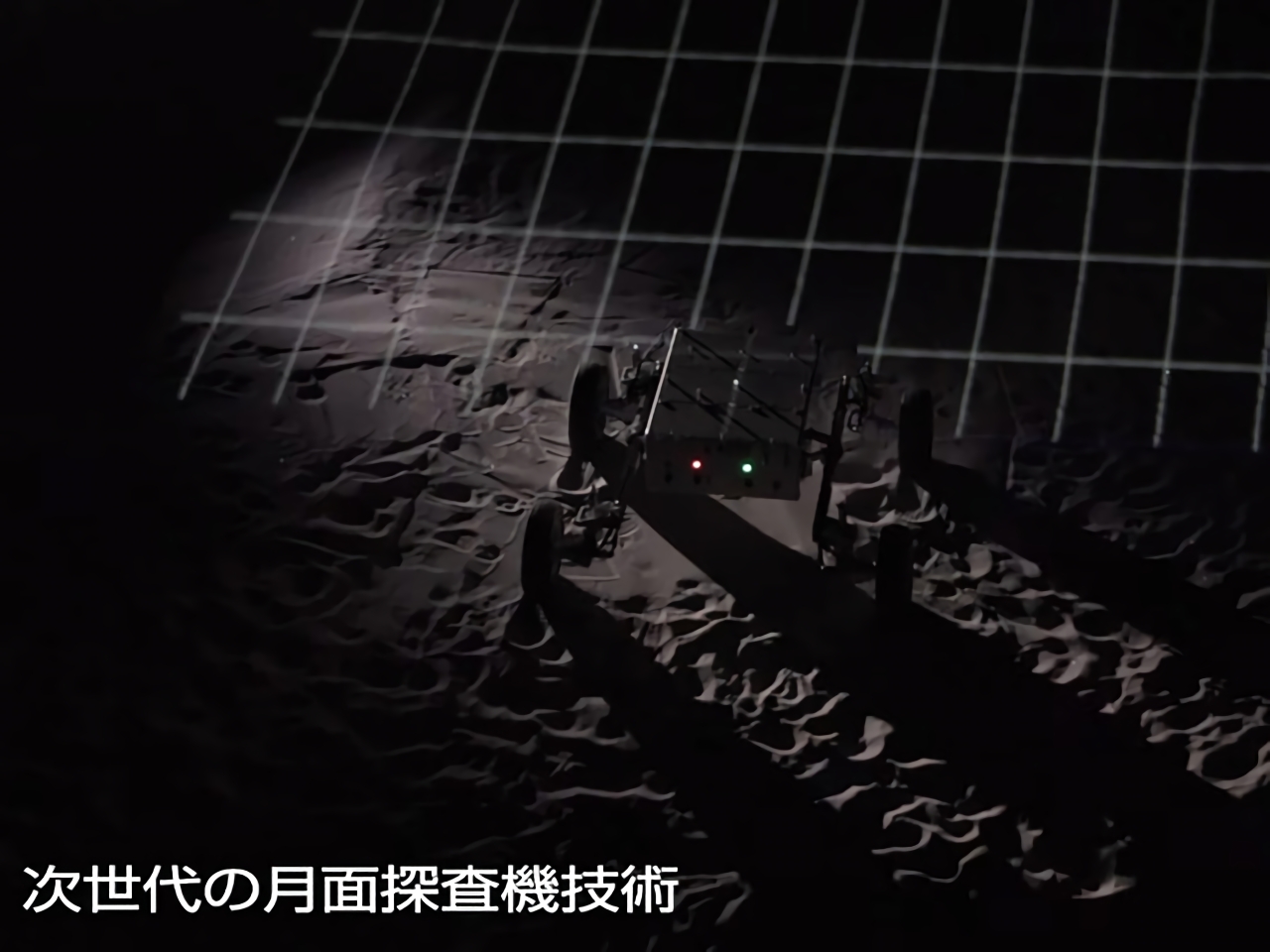
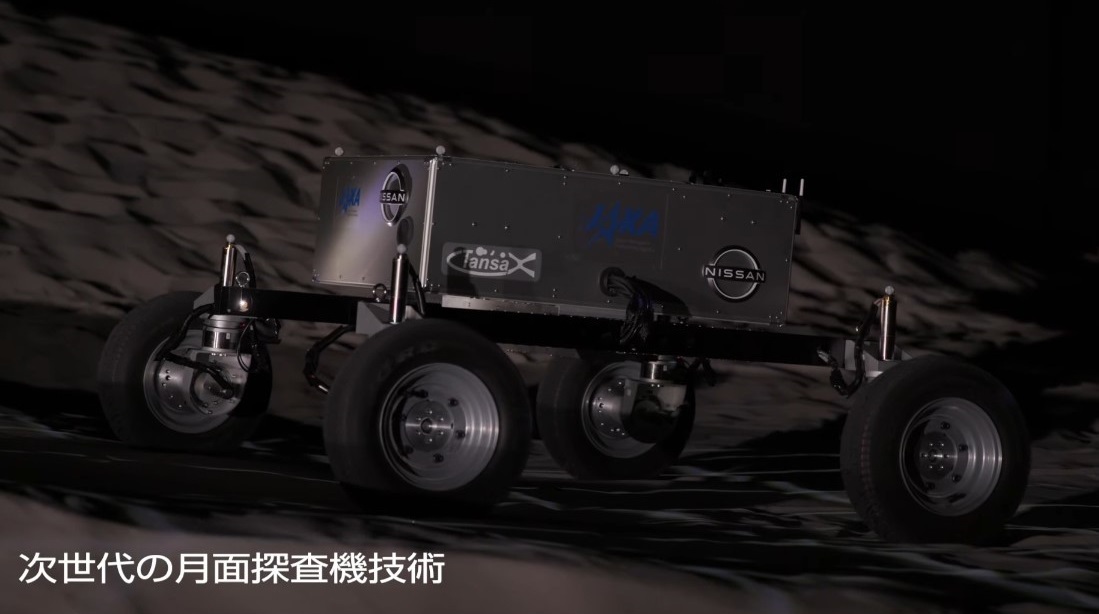
日産自動車は12月2日、日産グローバル本社ギャラリーで開催される「NISSAN FUTURES」において、宇宙航空研究開発機構(JAXA)と共同で研究する月面ローバ(探査車)の試作機を公開したと発表した。
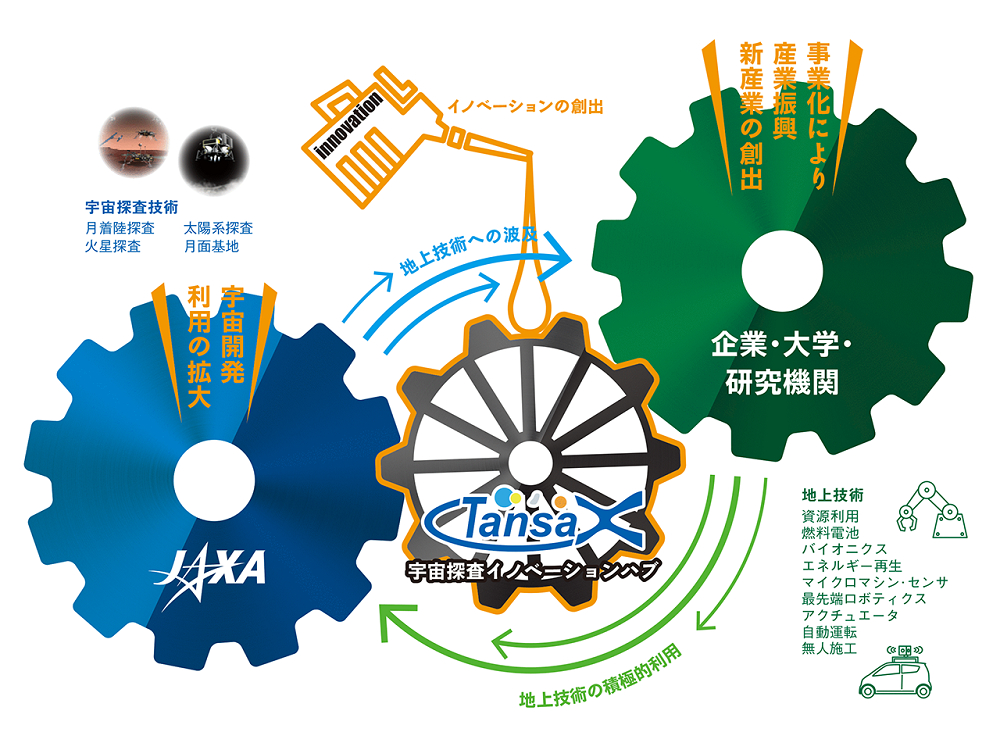
さまざまな異分野の人材、知識を集めた組織を構築し、これまでにない新しい体制や取組でJAXA全体に宇宙探査に係る研究の展開や定着を目指す「宇宙探査イノベーションハブ」では、宇宙探査に必要な技術のひとつとして月面ローバの研究を実施している。
月面は、砂地で覆われ、起伏に富んだ場所が多く、過酷な環境下にある。また、走行用のエネルギーも限られていることから、月面ローバには高い走破性や、高効率な走行性能が求められている。
日産自動車は、2020年1月から共同研究に参画。「日産リーフ」に代表される電気自動車の開発で培ってきたモーター制御技術と、「日産アリア」に搭載される電動駆動4輪制御技術「e-4ORCE」を応用し、月面ローバの駆動力制御に関してJAXAとともに研究を進めているという。
特に、独自技術となるe-4ORCEは、電動駆動ならではの4輪制御技術で、どのような環境下においてもドライバーが安心して運転できるだけでなく、車両姿勢を制御することにより同乗者にも快適な乗り心地を提供できるとしている。
JAXAとの共同研究では、このe-4ORCEをさらに進化させ、砂地などの過酷な環境下での走行性能を高める技術を開発している。
路面状況に応じてタイヤの空転量を最小限に抑えられれば、砂地でのスタック(脱出困難な状態)を回避できるだけではなく、空転によるエネルギーロスの最小化にもつながり、結果として走行エネルギーを効率化できるようになる。
過酷な環境での走行性能の向上、走行エネルギーを効率化する技術の開発は、月面で走るローバだけでなく、地上で走るクルマなど、さまざまな路面環境の走行性能も向上させるという。
同社では、共同研究を通じ、テストカーの開発で得た知見と、ローバの研究で得られたJAXAの知見を互いに共有することで、地上を走行するクルマと宇宙探査の両面で技術を進化させることを目指す。
(この記事はCNET Japanからの転載です)
Related Articles
最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #衛星データ
- #スペースデブリ
- #アストロスケール
- #中国
- #SpaceX
- #Falcon 9
- #Starship
- #CLPS
- #宇宙飛行士
- #サンプルリターン
- #Super Heavy
- #Blue Origin
- #サブオービタル
- #ispace
- #HAKUTO-R
- #天地人
- #Space BD
- #Rocket Lab
- #宇宙港
- #キューブサット
- #スカパーJSAT
- #NASA
- #天宮
- #JPL
- #SAR
- #コンステレーション
- #ISS
- #CCP
- #Axiom Space
- #ISRO
- #QPS研究所
- #JAXA
- #Starlink
- #Intuitive Machines
- #KDDI
- #ESA
- #火星
- #LEO
- #Orion
- #SLS
- #Boeing
- #Starliner
- #ElevationSpace
- #きぼう
- #Crew Dragon
- #Synspective
- #Artemis
- #HOSPO
- #Artemis III
- #GNSS
- #インターステラテクノロジズ
- #SLIM
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #J-SPARC
- #宇宙なんちゃら こてつくん