



特集
ブリヂストン、月面ローバー開発のアストロボティックと協業–「月面タイヤ」開発を加速(秋山文野)
2024.11.05 09:34



ブリヂストンは11月1日、米国で月面探査車(ローバー)を開発するAstrobotic Technologyと、ローバー向けタイヤ開発の協業契約を締結したと発表した。両者は今後月面への打ち上げ、および宇宙での熱環境におけるタイヤの耐久性を確認する予定だという。
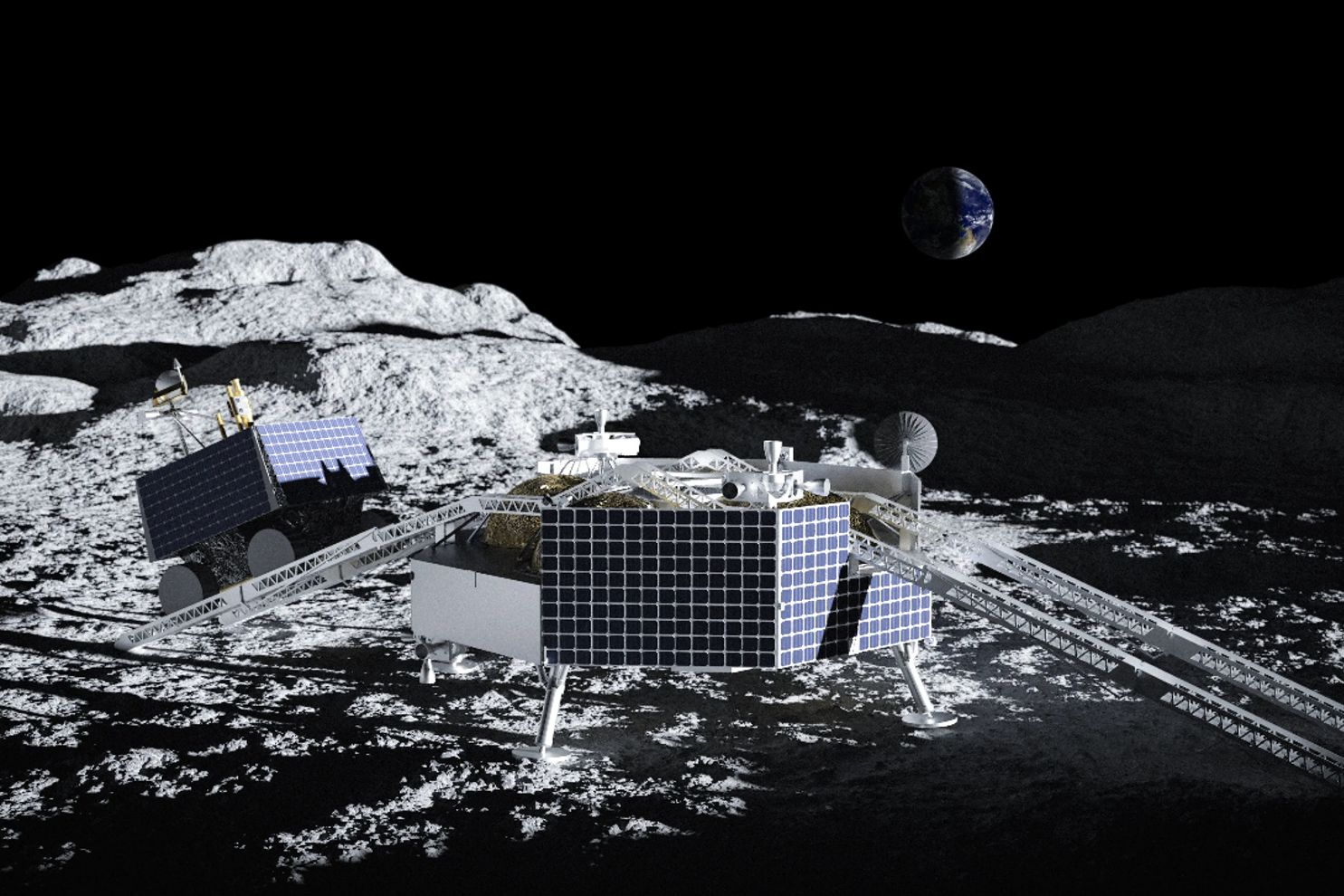
ブリヂストンと共同開発したタイヤを装着する予定の「24U CubeRover(トゥエンティーフォー ユー キューブローバー)」は、月面で科学調査機器とペイロードを搭載する中型ローバー。ペイロードへの電力供給と長距離通信機能を兼ね備え、10cm角の規格化された月面ペイロードを柔軟に搭載することができる。


ブリヂストンは、2019年にトヨタがJAXAと共に月面有人探査車「有人与圧ローバ」の開発を発表したのと同時に、ローバーを支えるタイヤ開発社として名乗りを上げた。月面は大気がなく、細かい「レゴリス」と呼ばれるパウダー状の砂で覆われて機体が沈み込みやすいため、スリップやスタックが起きやすい悪路だ。
120度以上の高温から-170度の極低温までの温度サイクルを繰り返し、タイヤにとって非常に過酷な環境でもある。また、ゴムは低温で硬化してしまうため使用できない。そこでブリヂストンは空気を利用しない独自の「AirFree」技術を活用し、オール金属製で荷重を支え続けるタイヤを開発している。
これまで、「第1世代」と呼ばれる基本骨格としてスプリング構造を取り入れ、表面には、砂漠を歩くラクダの脚にヒントを得たというスチールウール状の金属フエルト素材を使用したタイヤ、「第2世代」となる基本骨格を重量と耐久性のバランスがよい金属製スポーク構造に変更したタイヤを開発している。
2024年5月には、鳥取砂丘月面実証フィールド「ルナテラス」で月面探査車用タイヤ「第2世代」の走行試験をメディア向けに公開した。このとき、JAXAの有人与圧ローバだけでなく、NASAの月面探査など各国の無人ローバーなどにもタイヤを展開して月面探査に参加する構想はあるのかという質問に、グローバル直需戦略/新モビリティビジネス推進部長の太田正樹氏は「その方向性はありうる」という見解を示した。それから5カ月、実際に開発協力が進んでいたことが明らかになった。
Astroboticは、NASAが民間企業と協力して進める月探査計画「Commercial Lunar Payload Services(CLPS)」に参加する企業の1社。2018年にNASAと契約し、2023年の着陸機実証ミッション「Peregrine(ペレグリン)M1」と、2024年の月南極着陸ミッション「Griffin M1」の2回を獲得した。
このうち、ペレグリンM1ミッションは2024年1月にULAのVulcanロケットで打上げられたが、月への軌道に乗ることができずに終了した。グリフィンM1ミッションでは、NASA開発の月極域探査機「VIPER」を搭載する予定だったが、2024年7月にNASAがVIPERミッションを中止したため、ペイロードを変更して、2025年に着陸ミッションを実施する方向で検討が続けられている。
Astroboticはグリフィンを発展させて2026年以降も月着陸探査ミッションを継続する方向だ。月面探査で活躍するのは、「CubeRover(キューブローバー)」と呼ばれる小型のローバー。「キューブ」の名の通り、超小型衛星「キューブサット」の規格をローバーに応用しており、10×10×10cmの規格化された探査ユニットを搭載できる、車輪のついた台車のような外観となっている。10cm角のユニット2個分の「2U」から24個分の「24U」まで拡張でき、ブリヂストンの協力は大型の24Uで展開されることが名称からうかがえる。
キューブローバーは、ユニット単位のペイロードを柔軟に組み替えることができ、太陽電池パネルの取り付け方によって月面の低緯度帯から極域にも対応できる。軌道上の通信インフラと通信する機能を持ち、将来は越夜によって長期間の探査にも対応する計画だ。
月面でさまざまな地域の探査に対応し、小型・4輪の2Uキューブローバーは最大25度の傾斜に対応、10cmの段差を乗り越えることができるという。走行スピードは標準で秒速4cm、最大で秒速10cmを謳っている。
2Uキューブローバーの資料には、3Dプリントで試作中のメッシュ状のホイールが公開されている。金属製スポークを採用したブリヂストンのタイヤは、耐久性を確保しながらも柔らかく変形することで、月面にある岩などの障害物を乗り越えて走行することが可能になるという。走行性能の鍵となるタイヤ部分を専門メーカーと協業することで能力を確実にしたい目的があると考えられる。
一方、ブリヂストン側から考えてみれば、米国の活発な民間月探査への参加は、月面実証の機会獲得になる。JAXAの有人与圧ローバは、総走行距離では1万km、運用期間は10年間、最大速度時速15km、最大斜度20度という、アポロ計画をはるかに超える高い目標を持っている。実現にあたっては、無人ローバーで月面の多様な地域を実際に走行して知見を獲得する機会は必須だろう。ブリヂストン、アストロボティックの協力は、無人月探査を日本も参加する有人月探査実現の力にしていく布石となる。



秋山文野
サイエンスライター/翻訳者
1990年代からパソコン雑誌の編集・ライターを経てサイエンスライターへ。ロケット/人工衛星プロジェクトから宇宙探査、宇宙政策、宇宙ビジネス、NewSpace事情、宇宙開発史まで。著書に電子書籍『「はやぶさ」7年60億kmのミッション完全解説』、訳書に『ロケットガールの誕生 コンピューターになった女性たち』ほか。2023年4月より文部科学省 宇宙開発利用部会臨時委員。
秋山文野
サイエンスライター/翻訳者
1990年代からパソコン雑誌の編集・ライターを経てサイエンスライターへ。ロケット/人工衛星プロジェクトから宇宙探査、宇宙政策、宇宙ビジネス、NewSpace事情、宇宙開発史まで。著書に電子書籍『「はやぶさ」7年60億kmのミッション完全解説』、訳書に『ロケットガールの誕生 コンピューターになった女性たち』ほか。2023年4月より文部科学省 宇宙開発利用部会臨時委員。
Related Articles



最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #SpaceX
- #Falcon 9
- #Rocket Lab
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Crew Dragon
- #Axiom Space
- #ISS
- #HOSPO
- #SPACE COTAN
- #宇宙港
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #SLIM
- #HAKUTO-R
- #ispace
- #Starship
- #Super Heavy
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん