


ニュース
ispaceの月面探査「HAKUTO-R」、2022年末に打ち上げ–民間企業として初
2022.02.07 08:00



ispace(東京都中央区)は1月25日、民間月面探査プログラム「HAKUTO-R」のミッション1とミッション2の進捗を発表した。月着陸船(ランダー)を打ち上げる予定のミッション1の打ち上げ時期は2022年末を予定している。2023年の打ち上げを予定していたミッション2は、2024年に変更した。
ミッション1が成功すれば、民間企業として初めて月面に着陸することになる。HAKUTO-Rの前身となるプロジェクト「HAKUTO」は、月面探査レース「Google Lunar XPRIZE」に参加、2017年に最終候補の5チームに選ばれた。
だが、他のチームのランダー開発とロケット契約が前提となっていたことで自力での月到達ができず、2018年3月にHAKUTOは終了となってしまった。現在進行中のHAKUTO-Rという名称は、HAKUTOを「Reboot」(再起動)するという思いが込められている。
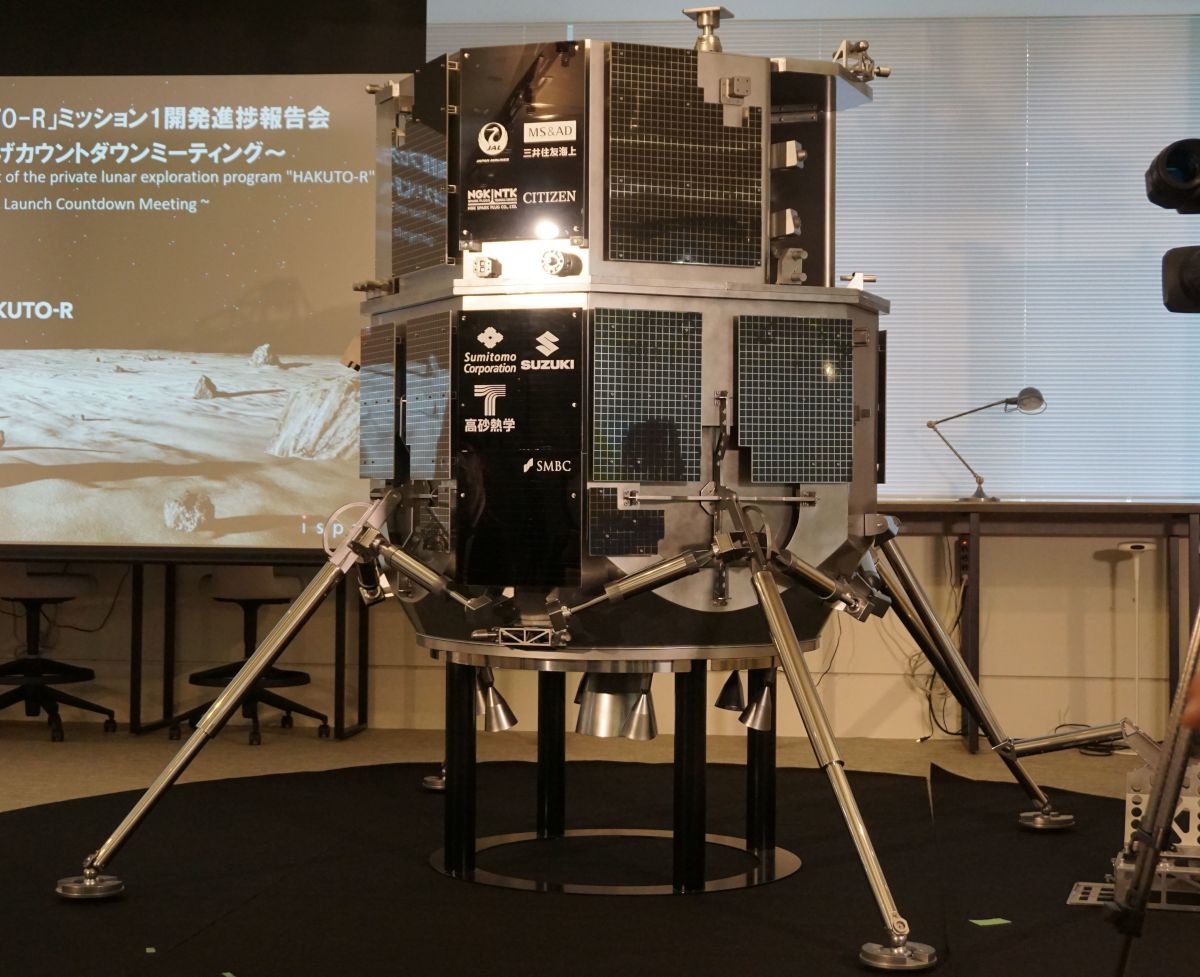
ミッション1のランダーは、2021年6月からドイツのランポルツハウゼンにある欧州企業Arianespaceの施設にispaceのQuality Control & Assembly, Integration & Testing(ATI)グループが常駐してフライトモデルの組立作業を開始。多層断熱材やソーラーパネル、展開機構などの部品を取り付けて、2022年2月に組み立てや統合を終えて、2022年春頃には“荷物(ペイロード)”の統合が完了、環境試験を終えてから打ち上げ予定地であるアメリカに輸送される予定となっている。SpaceXの「Falcon 9」で打ち上げられる。
打ち上げ後のランダーは、ispaceが東京都中央区日本橋にあるビルに管制室(ミッションコントロールセンター)から運用。HAKUTO-Rのミッションで起こり得る課題を想定したシミュレーション訓練も開始した。管制室での運用は、米航空宇宙局(NASA)や日本の宇宙航空研究開発機構(JAXA)、欧州宇宙機関(ESA)などのミッションの運用経験があるエンジニアが担うという。
ランダーには以下のようなペイロードが搭載される予定となっている。
- 日本特殊陶業の固体電池
- Mohammed Bin Rashid Space Centre(MBRSC)の月面探査ローバー「Rashid」
- JAXAの変形型月面ロボット
- Mission Control Space Services(MCSS)のフライトコンピューター
- Canadensys Aerospaceのカメラ
- HAKUTOのクラウドファンディング支援者の名前が刻印されたパネル
日本特殊陶業(名古屋市瑞穂区)の固体電池は、酸化物系と呼ばれるタイプの固体電池であり、過酷な環境や広い温度範囲で使用可能と説明。宇宙のような空間での活用が期待できるという。月面での固体電池の実証実験は世界初としている。
Rashidはアラブ首長国連邦(UAE)ドバイの政府宇宙機関であるMBRSCが開発する月面探査ローバー。アラブ諸国で初となる月探査ミッション「Emirates Lunar Mission」で重要な役割を担うという。
JAXAの変形型月面ロボットは、月面での画像データを取得するために走行させて、月の表面を覆う砂(レゴリス)の挙動などのデータをランダー経由で地球に送信する。JAXAのほかタカラトミーや同志社大学、ソニーが共同で開発している。
Related Articles
最新記事
Show more
フォトレポート



カテゴリー
タグ検索
- #Rocket Lab
- #SpaceX
- #Blue Origin
- #中国
- #KDDI
- #Starlink
- #天宮
- #Artemis III
- #SLS
- #サブオービタル
- #ElevationSpace
- #Firefly Aerospace
- #衛星データ
- #HAPS
- #Axiom Space
- #Crew Dragon
- #ISS
- #HOSPO
- #SPACE COTAN
- #宇宙港
- #天地人
- #JAXA
- #スカパーJSAT
- #NASA
- #SLIM
- #ispace
- #HAKUTO-R
- #Super Heavy
- #Starship
- #きぼう
- #Space BD
- #インターステラテクノロジズ
- #Falcon 9
- #Synspective
- #SAR
- #Sierra Space
- #ESA
- #Orion
- #キューブサット
- #QPS研究所
- #CCP
- #Starliner
- #Boeing
- #J-SPARC
- #宇宙飛行士
- #CLPS
- #Intuitive Machines
- #アストロスケール
- #スペースデブリ
- #サンプルリターン
- #JPL
- #コンステレーション
- #ISRO
- #火星
- #LEO
- #Artemis
- #GNSS
- #H3
- #Perseverance
- #Artemis II
- #Artemis I
- #宇宙なんちゃら こてつくん